Актуальность
Автоматическое управление движением судна на современном уровне позволяет реализовать как более сложные режимы работы, например маневрирование судна в условиях подвижным помех и ограничениях на маневр, так и повысить скорость и точность планирования и отработки траекторий движения.
Существующие системы управления движения судна в основном функционируют в дистанционном режиме и лишь некоторые элементы заданий могут выполнять автономно без вмешательства диспетчера. Эта ситуация обусловлена использованием классических подходов при построении автоматических систем управления, которые принципиально не могут обеспечить приемлемое решение поставленной задачи.
Основой для разработки робототехнической системы на базе корабля или катера является современная нелинейная теория управления, которая позволяет синтезировать принципиально новые регуляторы для многосвязных нелинейных многомерных объектов, действующих в условиях нестационарных препятствий и возмущений. В совокупности с интеллектуальными алгоритмами планирования, такой регулятор может стать основой для создания робототехнических комплексов на базе надводных кораблей.
Предлагаемый подход к проектированию систем управления БЭК
При разработке систем автоматического управления АНПА мы придерживаемся следующей последовательности проектирования:
- Построение математической модели;
- Разработка законов и алгоритмов управления;
- Программно-аппаратная реализация системы автоматического управления.
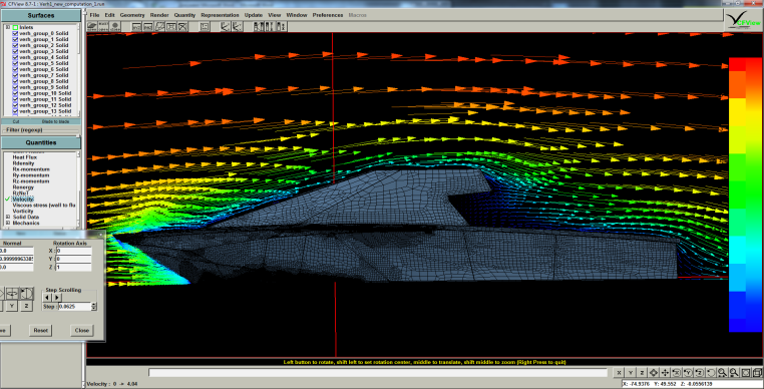
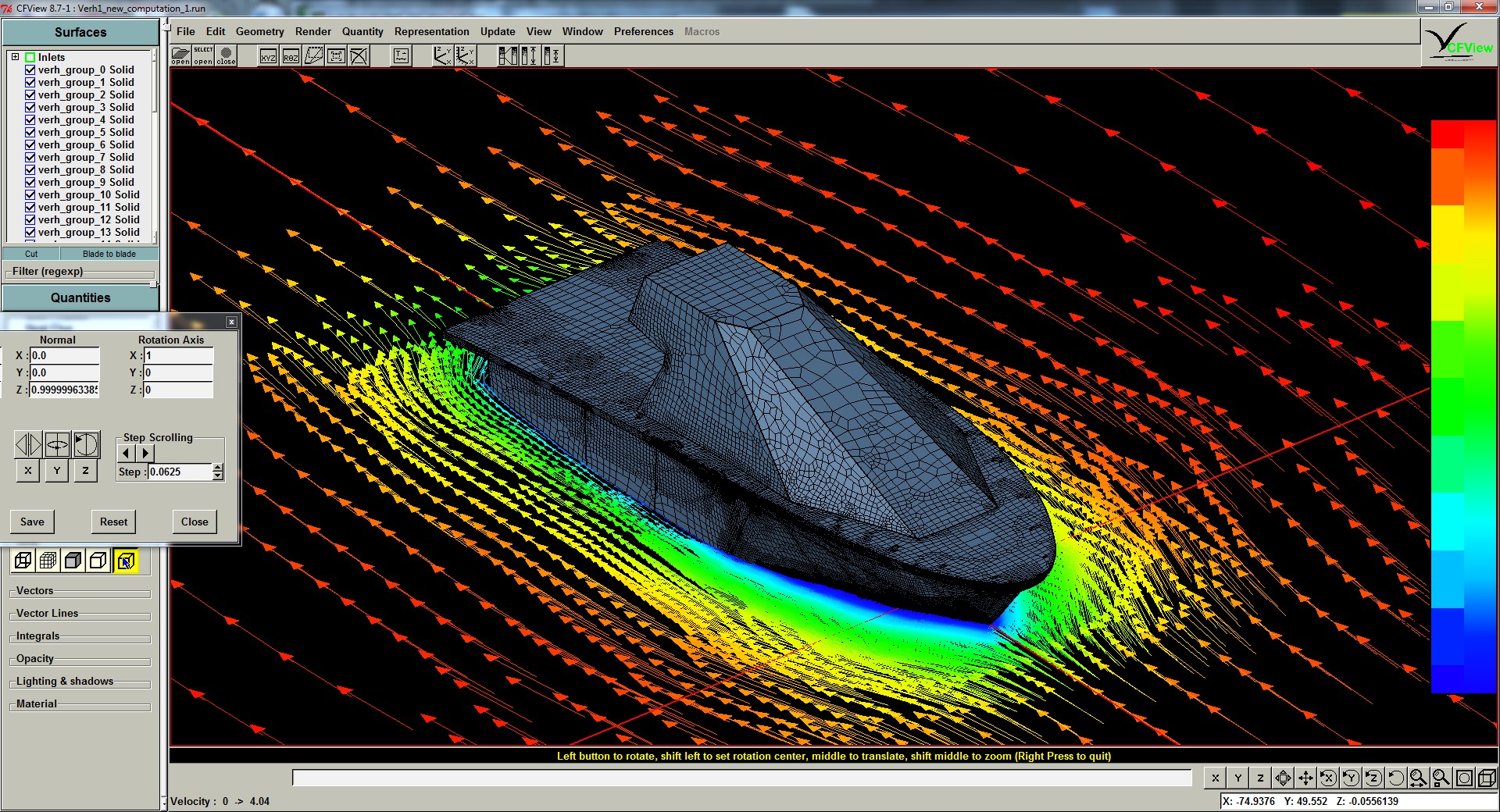
Построение математической модели
В общем случае катер перемещается в морской среде, параметры которой непрерывно изменяются, что отражается на величине воздействий на катер со стороны водной среды. Эти воздействия приводят к изменениям гидродинамических характеристик катера и должны учитываться его математической моделью в той или иной степени.
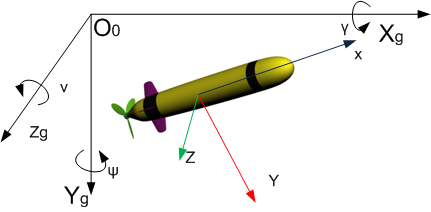

При движении катера на его подводную часть действуют гидродинамические силы, а на его надводную часть — аэродинамические силы.


Разработка законов и алгоритмов управления
Оригинальный запатентованный алгоритм управления рассчитывает необходимые для движения по заданной миссии уставки исполнительных механизмов.

Благодаря применению позиционно-траекторного подхода к управления БЭК и интеллектуальных методов планирования траектории и определению стратегии поведения БЭК удается достичь следующих результатов:
- Расширения функциональных возможностей БЭК при движении вдоль сложных траекторий с различными скоростями при наличии стационарных и подвижных препятствий.
- Повышение точности систем управления БЭК, посредством использования нейросинергетических методов управления и нелинейного метода комплексирования навигационных данных.
- Повышение быстродействия БЭК посредством использования оптимальных по быстродействию систем управления.
- Разработка унифицированной интеллектуальной интегрированной системы управления (ИСУ) БЭК, функционирующими в неопределенных средах с подвижными и стационарными препятствиями, на базе синергетического и нейросетевого подходов к организации стратегий поведения и отработки перемещений, для проведения широкого спектра исследовательских работ
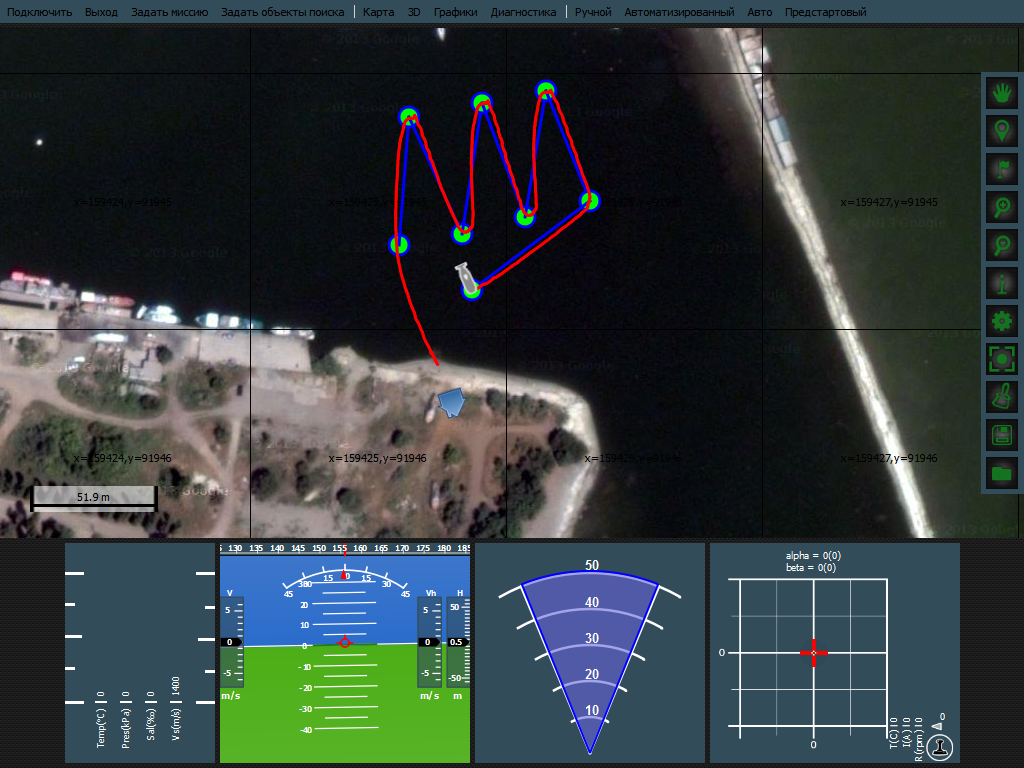
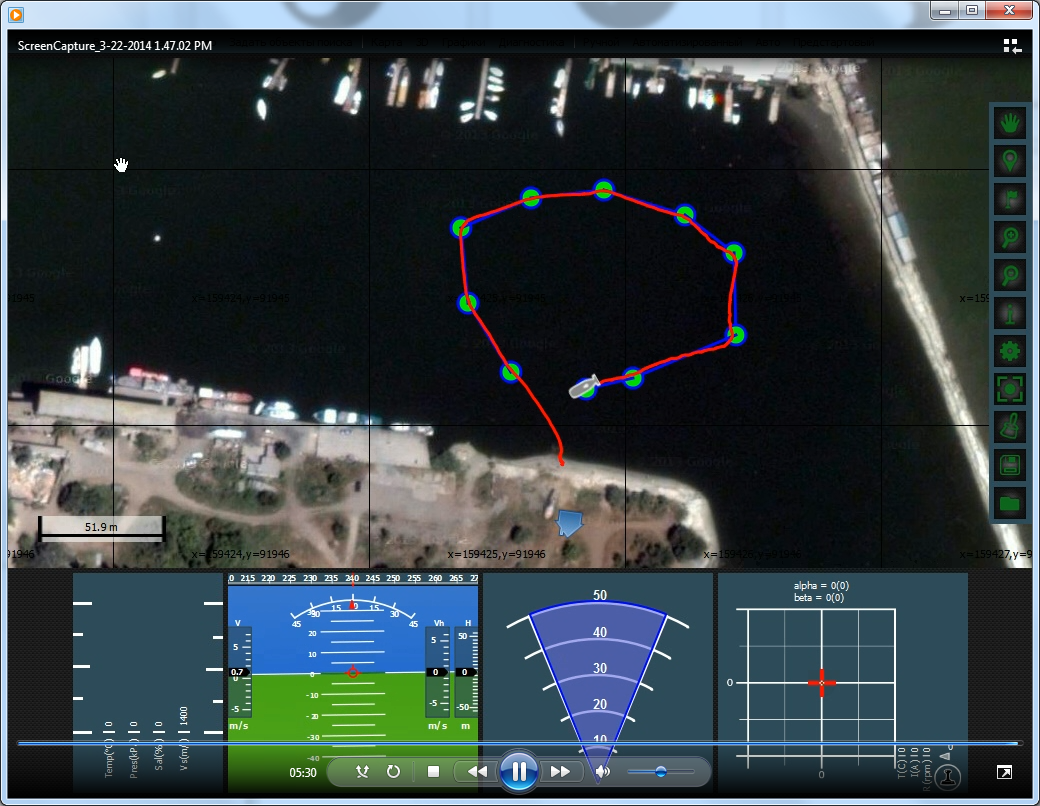
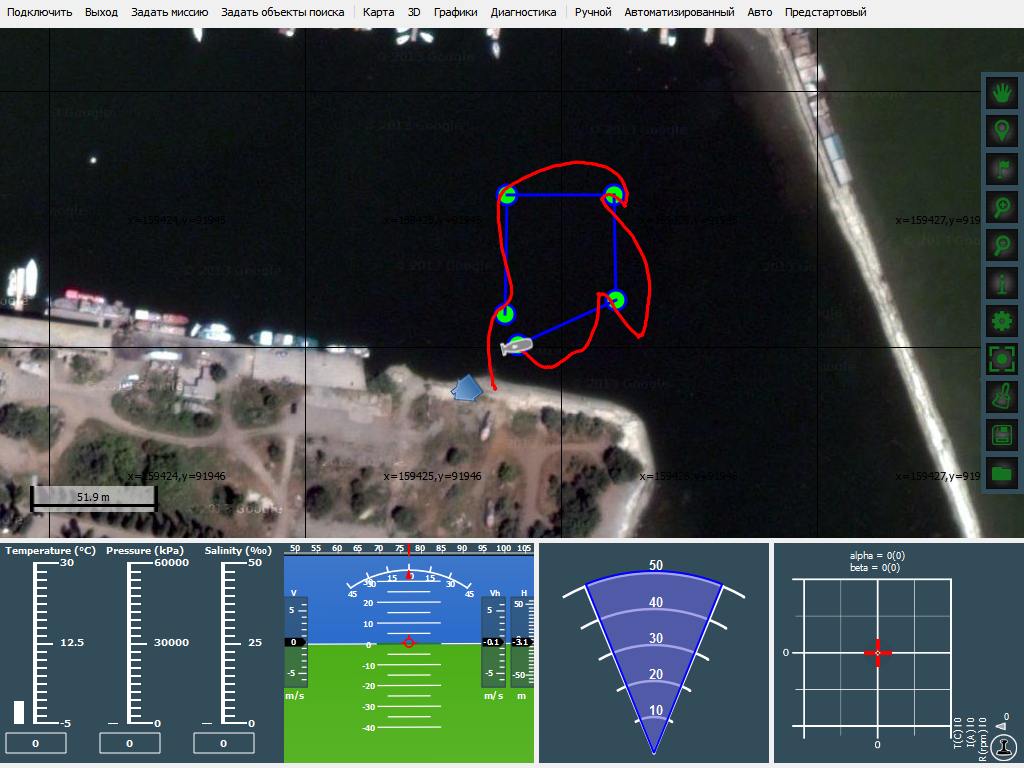
Разработка системы интеллектуальной планирования движений
В ходе выполнения программы-миссии БЭК посредством сенсоров обнаруживает препятствие, расположенное на траектории его движения и неучтенное в его программе-миссии. Интеллектуальный
планировщик, на основе данных от сенсоров, формирует новую траекторию движения, обеспечивающую безопасное прохождения участка с препятствием и возвращение на первоначальную траекторию движения, заданную в программе-миссии.

Программно-аппаратная реализация системы автоматического управления.
Прежде чем переходить к выбору отдельных элементов СУ БЭК, необходимо определить критерии функционирования системы в целом. На основе этих критериев формируются требования, в соответствии с которыми выбирается бортовое оборудование.
Основной задачей СУ является осуществление управления в автоматическом режиме БЭК, обеспечение безопасности плавания БЭК, управление их движением с учетом предупреждения столкновения с морскими объектами. Можно выделить следующие, общие для всех блоков СУ критерии:
– надежность, включающая в себя бесперебойное функционирование в заданных условиях эксплуатации;
– точность выполнения задачи;
– минимальная масса и габариты.
Исходя из этого, формируются требования аппаратной реализации блоков СУ БЭК:
– заменяемость, предполагающая возможность простой замены вышедшего из строя блока новым;
– использование максимально стандартизированных элементов при разработке блоков СУ;
– гибкость, предполагающая наличие резервных ресурсов (вычислительная мощность, каналы ввода/вывода, расширенные возможности программного интерфейса);
– компактное расположение различных электронных блоков в корпусе СУ БЭК.
Программное обеспечение бортового компьютера разработано на базе развитой операционной системы, имеет модульную иерархическую структуру. Это позволяет создавать различные сценарии его использования, удобно анализировать имеющиеся в системе данные и оперативно производить модификацию системы с использованием современных средств разработки.


Результаты работы
- Полная нелинейная математическая модель двжиения безэкипажного катера или корабля
- Анализ управляемости объекта, анаилз устойчивости системы управления в целом
- Программное и алгоритмическое обеспечение системы управления
- Аппаратные блоки управления и планирования
- Моделирующий и тренажерный комплекс, а так же результаты математического и полунатурного моделирования
- Сопровождение испытаний



Интеллектуальная собственность







Реализованные проекты
 Система управления надводным мини-катером
Система управления надводным мини-катером
![]() Система управления роботизированного катера для экологического мониторинга
Система управления роботизированного катера для экологического мониторинга
 Моделирующий комплекс автономных катеров
Моделирующий комплекс автономных катеров
Публикации
- Пшихопов В.Х., Медведев М.Ю., Гуренко Б.В., Медведева Т.Н. Создание управляющих устройств на базе микроконтроллерных средств: Учебное пособие. – Таганрог: Изд-во ТТИ ЮФУ, 2011 – 120 с.
- Пшихопов В.Х., М.Ю. Медведев, Б.В. Гуренко, А.А. Мазалов Адаптивное управление нелинейными объектами одного класса с обеспечением максимальной степени устойчивости // Известия ЮФУ. Технические науки. Тематический выпуск «Перспективные системы и задачи управления». – Таганрог: ТТИ ЮФУ.- 2012.-№3(116) – С.180-186
- Б.В. Гуренко, О.К. Ермаков Обзор и анализ состояния современной надводной робототехники XI Всероссийской научной конференции молодых ученых, студентов и аспирантов «Техническая кибернетика, радиоэлектроника и системы управления»: Сборник материалов. – Таганрог: Изд-во ЮФУ, 2012,–Т. 1, С. 211-212
- Пшихопов В.Х., Гуренко Б.В. Разработка и исследование математической модели автономного надводного мини-корабля «Нептун» [Электронный ресурс] //»Инженерный вестник Дона», 2013, №4. – Режим доступа: http://www.ivdon.ru/ /ru/magazine/archive/n4y2013/1918 (доступ свободный) – Загл. с экрана. – Яз. Рус
- Пшихопов В.Х., Б.В. Гуренко Синтез и исследование авторулевого надводного мини-корабля «Нептун» [Электронный ресурс] // «Инженерный вестник Дона», 2013, №4. – Режим доступа: http://www.ivdon.ru/ru/magazine/archive/ /n4y2013/1919 (доступ свободный) – Загл. с экрана. – Яз. рус.
- Гуренко Б.В. Реализация и экспериментальное исследование авторулевого автономного надводного мини-корабля «Нептун» [Электронный ресурс] // «Инженерный вестник Дона», 2013, №4.Режим доступа: http://www.ivdon.ru/ru/magazine/archive/n4y2013/1920(доступ свободный) – Загл. с экрана. – Яз. рус.
- Программное обеспечение бортовой системы управления автономной робототехнической системы на базе надводного мини-корабля: свидетельство о государственной регистрации программы для ЭВМ №2013660412 / Пшихопов В.Х, Гуренко Б.В., Назаркин А.С. – Зарегистрировано в Реестре программ для ЭВМ 5 ноября 2013 г.
- Программное обеспечение навигационной системы автономной робототехнической системы на базе надводного мини-корабля: свидетельство о государственной регистрации программы для ЭВМ №2013660554 / Гуренко Б.В., Котков Н.Н. – Зарегистрировано в Реестре программ для ЭВМ 11 ноября 2013 г.
- Программно-моделирующий комплекс автономных морских подвижных объектов: свидетельство о государственной регистрации программы для ЭВМ №2013660212 / Пшихопов В.Х., Медведев М.Ю., Гуренко Б.В. – Зарегистрировано в Реестре программ для ЭВМ 28 октября 2013 г.
- Программное обеспечение наземного пункта управления автономной робототехнической системы на базе надводного мини-корабля: свидетельство о государственной регистрации программы для ЭВМ №2013660554 / Гуренко Б.В., Назаркин А.С.– Зарегистрировано в Реестре программ для ЭВМ 28 октября 2013.
- Pshikhopov, V.K., Fedotov, A.A., Medvedev, M.Y., Medvedeva, T.N. & Gurenko, B.V. 2014, «Position-trajectory system of direct adaptive control marine autonomous vehicles», 2014 the 4th International Workshop on Computer Science and Engineering — Summer, WCSE 2014.
- Пшихопов В.Х, Медведев М.Ю., Федоренко Р.В., Гуренко Б.В., Чуфистов В.М., Шевченко В.А. Алгоритмы многосвязного позиционно-траекторного управления подвижными объектами // Инженерный вестник дона #4, 2014, url:ivdon.ru/ru/magazine/archive/N4y2014/2579 (доступ свободный) – Загл. с экрана. – Яз. рус.
- Пшихопов В.Х., Медведев М.Ю., Костюков В.А., Гайдук А.Р., Федоренко Р.В., Гуренко Б.В., Крухмалев В.А., Медведева Т.Н. Проектирование роботов и робототехнических систем: Учебное пособие – Ростов-на-Дону: Изд-во ЮФУ, 2014. – 195 с.
- Пшихопов В.Х, Федотов А.А, Медведев М.Ю., Медведева Т.Н., Гуренко Б.В., Позиционно-траекторная система прямого адаптивного управления морскими подвижными объектами // Инженерный вестник дона #3, 2014, url:ivdon.ru/ru/magazine/archive/n3y2014/2496 (доступ свободный) – Загл. с экра-на. – Яз. рус.
- Пшихопов В.Х, Гуренко Б.В., Назаркин А.С. Реализация и экспериментальное исследование микроконтроллерного блока управления исполнительными механизмами автономного надводного мини-корабля «Нептун» // Инженерный вестник дона #4, 2014, url:ivdon.ru/ru/magazine/archive/N4y2014/2625 (доступ свободный) – Загл. с экра-на. – Яз. рус.
- Гуренко Б.В., Федоренко Р.В., Назаркин А.С. Система управления автономного надводного мини-корабля // Современные проблемы науки и образования. – 2014. – № 5; url:www.science-education.ru/119-14511 (дата обращения: 10.09.2014).
- Пшихопов В.Х., Федотов А.А., Медведев М.Ю., Медведева Т.Н., Гуренко Б.В., Задорожный В.А. Позиционно-траекторная система прямого адаптивного управления морскими подвижными объектами // Сборник материалов Девятой Всероссийской научно-практической конференции «Перспективные системы и задачи управления». Таганрог. Изд-во ЮФУ, 2014. – С. 356 – 263.
- Копылов С.А., Федоренко Р.В., Гуренко Б.В., Береснев М.А. Программный комплекс для обнаружения и диагностики аппаратных отказов в роботизированных морских подвижных объектах // Инженерный вестник дона #3, 2014, url:ivdon.ru/ru/magazine/archive/n3y2014/2526. (доступ свободный) – Загл. с экрана. – Яз. рус.
- Гайдук А.Р. Плаксиенко Е.А. Гуренко Б.В. К синтезу систем управления с частично заданной структурой // Научный вестник НГУ. Новосибирск, №2(55) 2014, С. 19-29.
- Гайдук А.Р., Пшихопов В.Х., Плаксиенко Е.А., Гуренко Б.В. Оптимальное управление нелинейными объектами с применением квазилинейной формы // Наука и образование на рубеже тысячелетий. Сб. научн.-исслед. работ КГТИ. Вып.1, Кисловодск. 2014 с 35-41
- Береснев М.А., Береснев А.Л., Гуренко Б.В. Особенности выбора типа сило-вой установки для автономных морских роботизированных систем // Сборник н. трудов по итогам м. н-п.к. «Современный взгляд на проблемы технических наук». — Уфа, 2014. – С. 9-11.
- Береснев А.Л., Береснев М.А., Гуренко Б.В. Подбор топлива для двигателя автономного роботизированного катера // Сб. ст. по материалам XXXVII между-нар. н-п.к «Технические науки — от теории к практике». — Новосибирск: Изд. «СибАК», 2014. — С. 59-64.
- Береснев А.Л., Береснев М.А., Гуренко Б.В. Использование ДВС с искровым зажиганием на автономном катере // Сб. ст. по материалам XXVI-XXVII междунар. заоч. н-п.к «Научная дискуссия: вопросы технических наук». — М.: Изд. «МЦНиО», 2014. — С.37-41
- Береснев М.А., Береснев А.Л., Гуренко Б.В. Способы управления ДВС с искровым зажиганием в составе автономного роботизированного катера // Сборник н.трудов по итогам XXXVII м. н-п.к. «Инновации в науке». — Новосибирск: Изд. «СибАК», 2014. — С 34-38.
- «Береснев М.А., Гуренко Б.В. «Методика синтеза адаптивной системы управления подвижными объектами» // Сборник трудов III Всероссийской н.к. молодых ученых,аспирантов и студентов ПАРУСА-2014. — Таганрог: ЮФУ, 2014. — с. 84-87»
- Гуренко Б.В., Копылов С.А., Береснев М.А. Разработка схемы диагностики отказов подвижных объектов // Международный научный институт Educatio. — 2014. — №6. — с.49-50.
- Gurenko, R. Fedorenko, A. Nazarkin, «Autonomous Surface Vehicle Control System,» Applied Mechanics and Materials, Vols 704, pp. 277-282, 2015, doi: 10.4028/www.scientific.net/AMM.704.277
- А.Р. Гайдук, Б.В. Гуренко, Е.А. Плаксиенко, И.О. Шаповалов Разработка алгоритмов управления безэкипажным катером, как многомерным нелинейным объектом // Известия ЮФУ. Технические науки. – 2015. – № 1. – С. 250 – 261.
- Р.В. Федоренко, Б.В. Гуренко Планирование траектории автономного мини-корабля // Инженерный вестник Дона. – 2015. – №4. – url: ivdon.ru/ru/magazine/archive/n4y2015/3280
- Гуренко Б.В., Назаркин А.С. Дистанционное управление надводным роботизированным катером // н.т.к., посв. Дню Российской науки и 100-летию ЮФУ. Сборник материалов конференции. — Ростов-на-Дону: Изд-во ЮФУ, 2015. — с. 158-159
- Костюков В.А., Маевский А.М., Гуренко Б.В. Математическая модель надводного мини-корабля // Инженерный вестник Дона. – 2015. – №4. – url: http://ivdon.ru/ru/magazine/archive/n3y2015/3297
- Gaiduk, B. Gurenko, E. Plaksienko, I. Shapovalov, M. Beresnev, «Development of Algorithms for Control of Motor Boat as Multidimensional Nonlinear Object», MATEC Web of Conferences, Vol. 34, 2015, http://dx.doi.org/10.1051/matecconf/20153404005
- Pshikhopov, V.a , Medvedev, M.a , Gurenko, B.b , Beresnev, M.a Basic algorithms of adaptive position-path control systems for mobile units ICCAS 2015 — 2015 15th International Conference on Control, Automation and Systems, Proceedings23 December 2015, Article number 7364878, Pages 54-59 DOI: 10.1109/ICCAS.2015.7364878
- Pshikhopov, M. Medvedev, V. Krukhmalev,V. Shevchenko Base Algorithms of the Direct Adaptive Position-Path Control for Mobile Objects Positioning. Applied Mechanics and Materials Vol. 763 (2015) pp 110-119 © (2015) Trans Tech Publications, Switzerland. doi:10.4028/www.scientific.net/AMM.763.110
- Fedorenko, B. Gurenko, “Local and Global Motion Planning for Unmanned Surface Vehicle”, MATEC Web of Conferences, Vol. 45, 2016, doi: http://dx.doi.org/10.1051/matecconf/20164201005



