Importance
The high level of automatic control for an unmanned boat allows for more complicated operation modes, e.g. maneuvering in a crowded navigation areas and limitations on maneuvers. It also makes it possible to increase the speeds of path-planning and path-following.
The most of existing control systems operate in a remote control mode and only certain elements of the tasks can be performed autonomously without an operator’s intervention. This situation is caused by using the classical approaches in control system’s design. They can’t ensure an acceptable solution of the set task.
The control system for the boat robot system is based on the modern nonlinear control theory that allows for synthesis of the new types of controllers for multiply connected nonlinear multidimensional objects operating under the conditions of mobile obstacles and disturbances. Together with the intelligent path-planning algorithms such a controller can serve as a foundation for creation of robot systems based on surface ships.
The Proposed Approach to Design of Unmanned Boats
In development of automatic control systems for AUV we keep the following design steps.
- Mathematical model design;
- Development of control laws and algorithms;
- Hardware-softwar
e implementation of the automatic control algorithms.
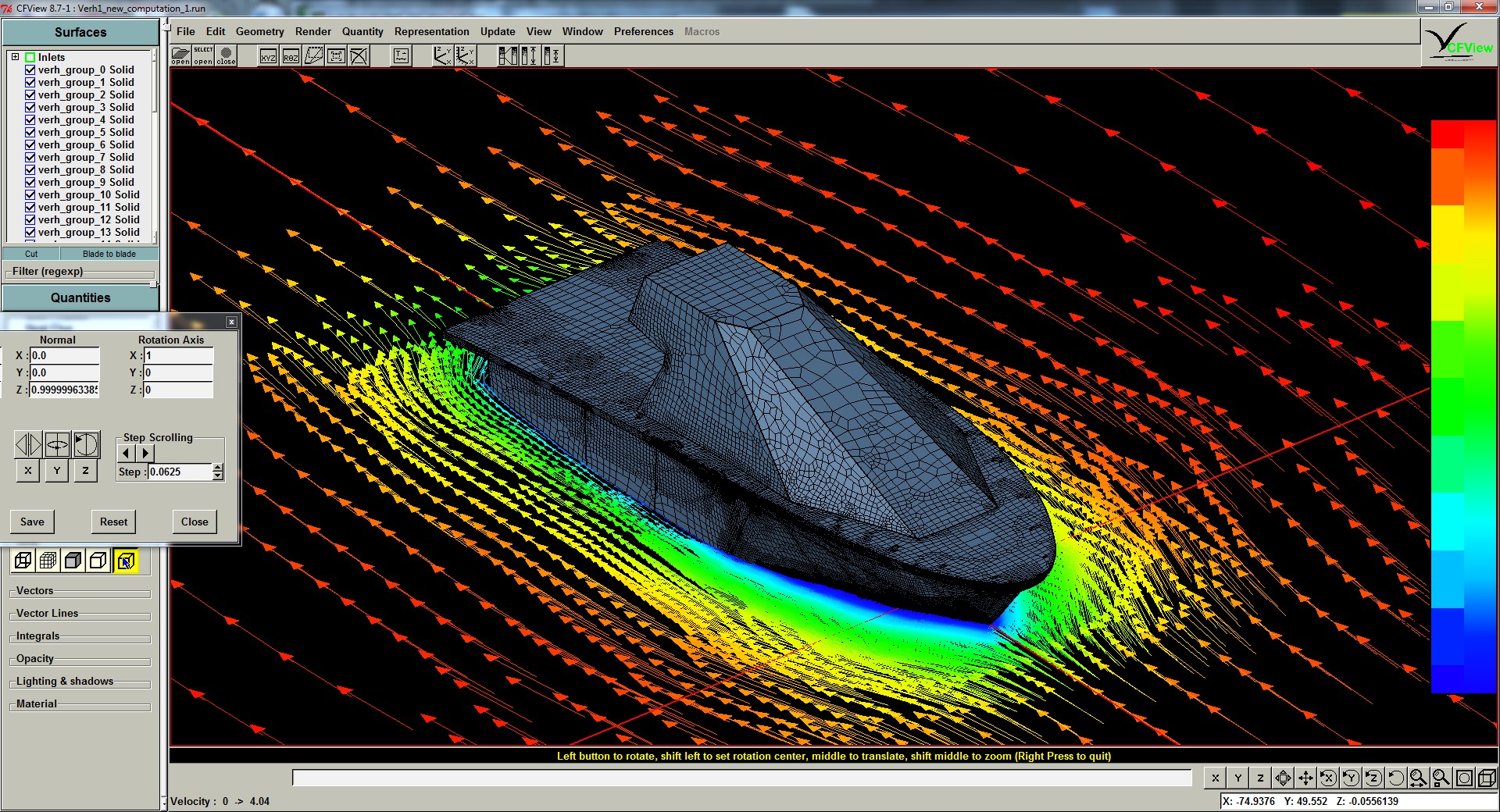
Building Mathematical Model
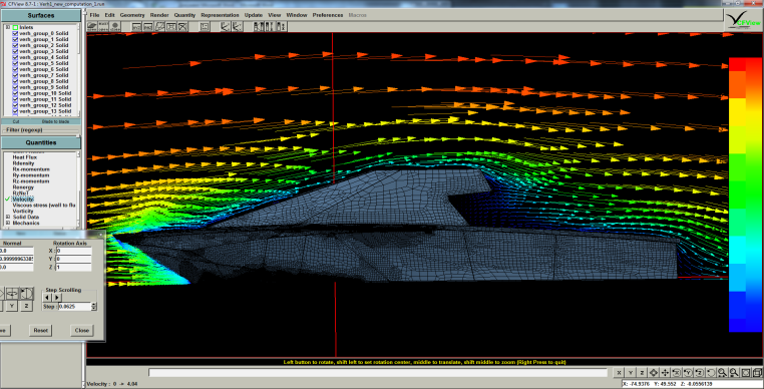
In the general case the boat moves in a sea environment with its parameters constantly changing, which affects the magnitude of actions of the environment on the boat. These actions lead to changes of the hydrodynamic characteristics of the boat and have to be accounted by its mathematical model to a certain degree.
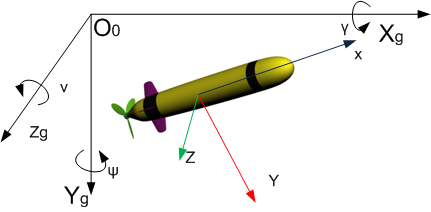

During the boat’s motion its underwater part is under action of hydrodynamic forces, while its above-water part is influenced by the aerodynamic forces.


Development of Control Laws and Algorithms
A unique patented control algorithm calculates the necessary reference values for the actuators during the mission.

Owing to application of position-path approach to the boat control and usage of intelligent methods of path planning and determining the behavior strategies, the following results can be achieved:
- Extending the functional capabilities of the unmanned boats following complicated trajectories with various speeds at presence of stationary and mobile obstacles;
- Increasing of accuracy of control systems by using neuro-synergetic control methods and nonlinear approach for aggregation of the navigation data;
- Increasing the unmanned boat’s speed by using speed-optimal control systems.
- Development of a unified intelligent integrated control system for the unmanned boat operating in uncertain environments with mobile and stationary obstacles based on synergetic and neural networking approach to organization of the behavior strategies and performing the motions for conduction of a wide spectrum of research works.
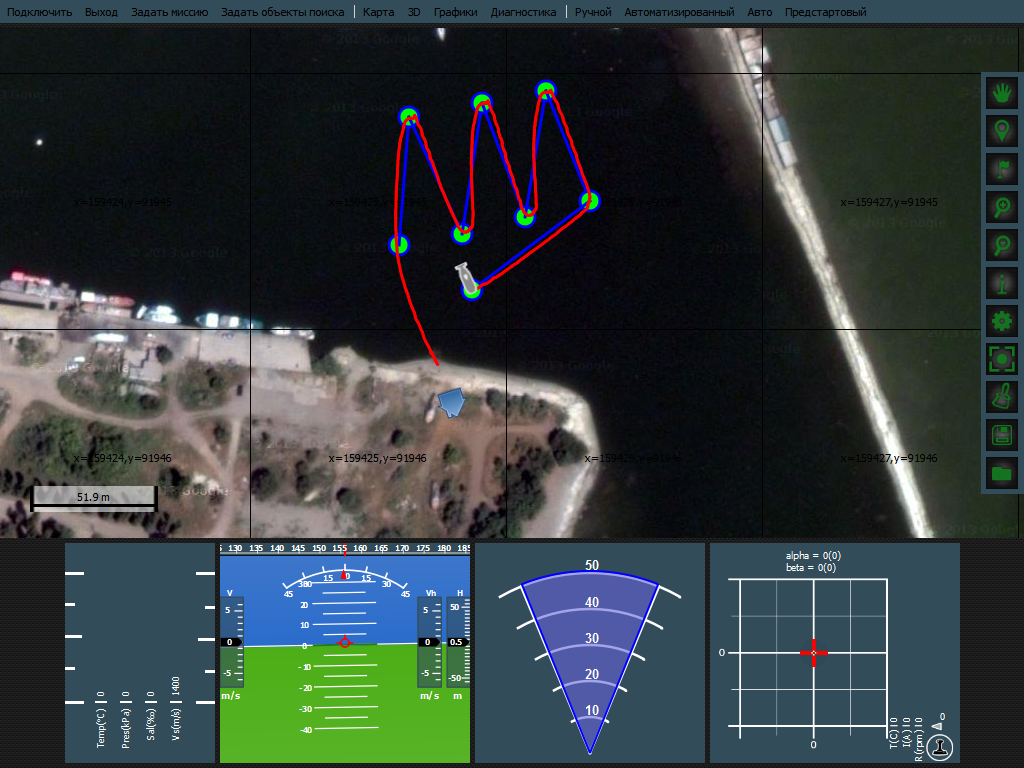
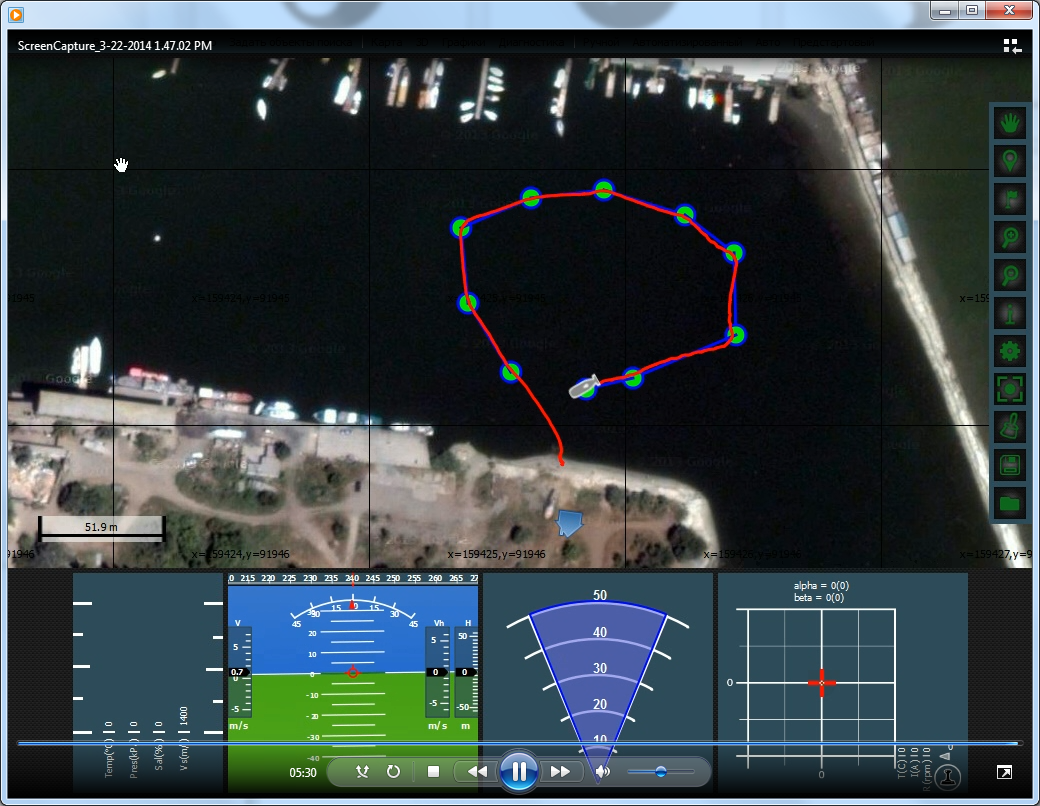
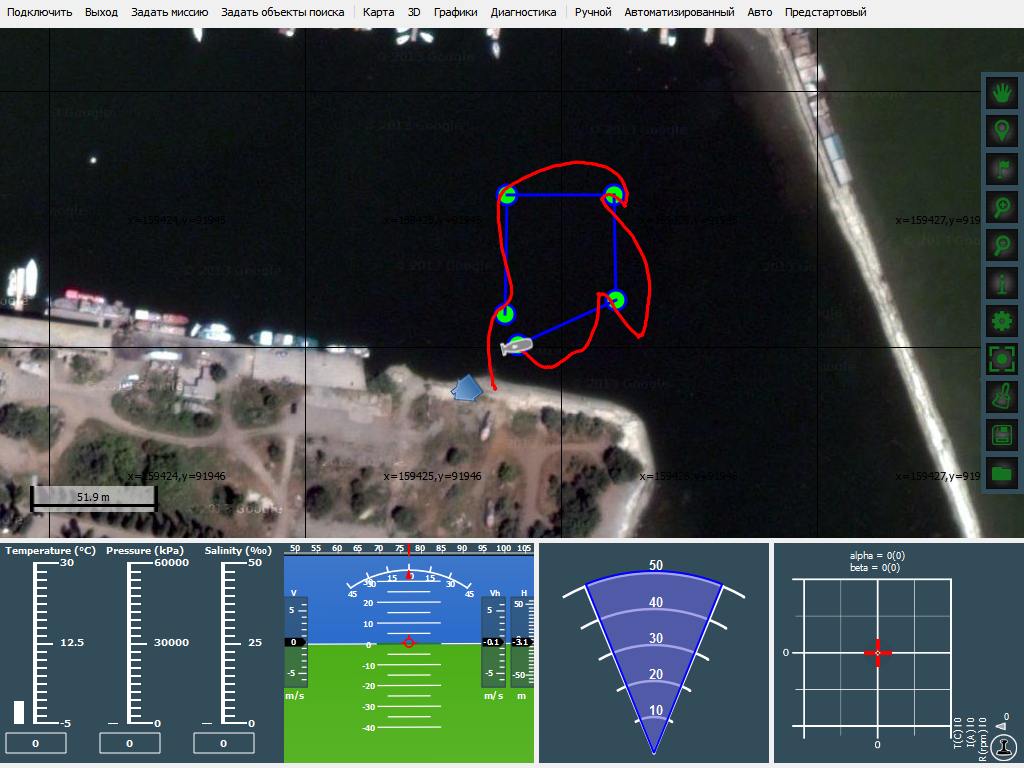
Development of an Intelligent Path-Planning System
During its mission the unmanned boat uses its sensors to detect obstacles located on its motion path and not accounted by is program-mission. The intelligent planner based on the data from sensors forms the new motion path ensuring safe passing of the obstructed area and returns it to the original path set in the mission program.

Hardware-Software Implementation of Automatic Control System
Before proceeding to the selection of the specific elements of the control systems CS for the Unmanned Boat (UB) it is necessary to define the main performance criteria for the system. Based on these criteria the requirements for selection of onboard equipment are formed.
The main task of the control system is performing control in the mode of automatic operation of the unmanned boat, ensuring boat’s sailing safety, motion control avoiding the marine obstacles. It is possible to highlight the following criteria common for all the control system’s control units:
– reliability ensuring uninterrupted operation under the set conditions;
– task completion accuracy;
– minimal size and mass.
Based on this data the requirements to the hardware implementation of the unmanned boat’s control system are formed:
– replaceability allowing for a simple replacement of a failed unit by a new one;
– using the mostly standardized elements in development of control system’s units;
– flexibility assuming presence of redundant resources (computational capacities, input/output channels, extended capabilities of the software interface);
– compact location of various electronic units in the body of the control system block.
Software for the onboard computer is developed using a sophisticated operating system with a modular structure. This allows for creation of various scenarios data analysis. The systems can be modified using the modern development tools.


Results of Work
- full nonlinear mathematical model of the motion of unmanned boat or ship;
- analysis of the plant’s controllability, stability analysis of the whole control system;
- software and algorithms for the control system;
- hardware units for control and planning;
- modeling and training system and the results of mathematical and semi-natural modeling;
- performing testing;



Intellectual Property







Implemented projects
 Control system for an above-water mini-boat
Control system for an above-water mini-boat
![]() Control system for a robotic boat for ecological monitoring
Control system for a robotic boat for ecological monitoring
 Modeling system for autonomous boats
Modeling system for autonomous boats
Bibliography
- V.Kh.Pshikhopov, M.Yu.Medvedev, B.V.Gureko, T.N.Medvedeva, Creating a controlling device using microcontrollers
: Teaching aid. – Taganrog: SFEDU Publishing House, 2011, 120 p. - V.Kh. Pshikhopov, M.U.Medvedev, V.B.Gurenko, A.A.Mazalov, Adaptive control of nonlinear objects of one class ensuring the maximal degree of stability// Izvestiya SFEDU. Technical Sciences. “Perspective systems and control problems”. – Taganrog SFEDU.- 2012,No.3(116) – pp.180-186
- B.V.Gurenko, O.K.Ermakov, Survey and analysis of the state of the modern above-water robotics on the XI All-Russian conference of young scientists, students and pros-graduate students “Technical cybernetics, radio-electronic
s and control systems. – Taganrog: SFEDU Press, 2012,–Vol. 1, pp.. 211-212 - V.Kh. Pshikhopov, B.V.Gurenko, Research and development of the mathematical model of autonomous above-water mini-ship “Neptune” [Internet Resource] //»Inzhenerny vestnik Dona», 2013, No.4. – URL: http://www.ivdon
.ru/ /ru/magazine/arc hive/n4y2013/191 8 (in Russian) - V.Kh. Pshikhopov, B.V.Gurenko, Research and development of automatic steering system of autonomous above-water mini-ship “Neptune” [Internet resource] // «Inzhenerny vestnik Dona», 2013, No.4. URL: http://www.ivdon
.ru/ru/magazine/ archive/ /n4y2013/1919 (in Russian). - B.V.Gurenko, Implementation and experimental research of autonomous [Internet Resource] // « Inzhenerny vestnik Dona», 2013, No.4.URL: http://www.ivdon
.ru/ru/magazine/ archive/n4y2013/ 1920 (in Russian). - Software of onboard control system for autonomous robotic system based on above-water mini-ship. State registration certificate No.2013660412 / Pshikhopov V.Kh., Gurenko B.V., Nazarkin A.S.– Registered on 5.20.2013.
- Software of navigation system for autonomous robotic system based on above-water mini-ship. State registration certificate No.2013660554 / Gurenko B.V., Kotkov N.N.– Registered on 11.10.2013 .
- Software modeling suite for autonomous marine vehicles. State registration certificate No.2013660212 / Pshikhopov V.Kh., Medvedev M.U., Gurenko B.V. – Registered on 28.10.2013 г.
- Software for the ground control unit of the autonomous robotic system based on above-water miniship. State registration certificate No.№2013660554 / GurenkoB.V., Nazarkin A.S.– Registered on 28.10.2013.
- Pshikhopov, V.K., Fedotov, A.A., Medvedev, M.Y., Medvedeva, T.N. & Gurenko, B.V. 2014, «Position-trajec
tory system of direct adaptive control marine autonomous vehicles», 2014 the 4th International Workshop on Computer Science and Engineering — Summer, WCSE 2014. - Pshikhopov V.Kh., Medvedev M.U., Fedorenko R.V., Gurenko B.V., Chufistov V.M., ShevchenkoV.A. Algorithms of multiply connected position-path control for vehicles//Inzhen
erny vestnik Dona No,4, 2014, url:ivdon.ru/ru/ magazine/archive /N4y2014/2579 (in Russian) - Pshikhopov V.Kh., Medvedev M.U., Kostukov V.A., Gaiduk A.R., Fedorenko R.V., Gurenko B.V., Krukhmalev V.A, Medvedeva T.N.,: Study guide – Rostov on Don: SFEDU Publishing House, 2014. – 195 p.
- Pshikhopov V.Kh., Fedotov A.A., Mdevedev M.U., Medvedeva T.N., Gurenko B.V., Position-path system of direct adaptive control for marine vehicles// Inzhenerny vestnik Dona No.3, 2014, url:ivdon.ru/ru/
magazine/archive /n3y2014/2496 (in Russian). - Pshikhopov V.Kh., Gurenko B.V., Nazarkin A.S., Implementation and experimental research of the microcontroller control unit and actuators of the autonomous above-water mini ship “Neptune”// Inzhenerny vestnik Dona No.4, 2014, url:ivdon.ru/ru/
magazine/archive /N4y2014/2625 (in Russian). - Gurenko V.B., Fedorenko R.V., Nazarkin A.S. Control system for autonomous above-water mini-ship// Modern problems of science and education – 2014. –No 5; url:www.science-
education.ru/119 -14511 (Publication date: 10.09.2014). - Pshikhopov V.Kh., Fedotov A.A., Medvedev M.U., Medvedeva T.N., Gurenko B.V., Zadorozhny V.A. Position-path control system for direct adaptive control of marine vehicles.// Proceedings of the 9th Scientific-Pract
ical Conference “Perspective Control Systems and Problems”,Taganr og SFEDU Publishing House, 2014. – p. 356 – 263. - Software suite for detection and diagnosis of hardware failures in robotic marine vehicles// Inzhenerny vestnik Dona No.3, 2014, url:ivdon.ru/ru/
magazine/archive /n3y2014/2526 (In Russian) - Gaiduk A.R., Plaksienko E.A.,Gurenko B.V., Synthesis of control systems with a partially defined structure.// Nauchny Vetnik NSU. Novosibirsk, No.2(55) 2014, pp. 19-29.
- Gaiduk A.R., Pshikhopov V.Kh, Plaksienko E.A., Gurenko B.V. Optimal control of nonlinear objects using quasilinear forms.// Science and Educaiton at the turn of the milleniums. Collection of scientific works of KHTI. Vol.1, Kislovodsk. 2014, p 35-41
- Beresnev M.A., Beresnev A.L., Gurenko B.V. Peculiarities of selecting the type of propulsion for autonomous marine robotic systems// Conference proceedings «Modern view of problems in technical sciences». — Ufa, 2014. – pp. 9-11.
- Beresnev M.A., Beresnev A.L., Gurenko B.V. Fuel selection for a robotic boat // Proc. of XXXVII international conference «Technical sciences – from theory to parctice». Novosibirsk, 2014, p. 59-64.
- Beresnev M.A., Beresnev A.L., Gurenko B.V., Using internal combustion engine with spark ignition on an autonomous boat // Proc. of XXXVII international conference «Scientific discussion: problems of technical sciences». — Moscow, MCCME Publishing House, 2014. — p.37-41
- Beresnev M.A., Beresnev A.L., Gurenko B.V., Controlling internal combustion engine as a part of autonomous robotic boat.// Prceedings of XXXVII international conference «Innovations in science», Novosibirsk, 2014. — p. 34-38.
- Beresnev M.A., Gurenko B.V., «Method of synthesis of adaptive control system for vehicles» // Proc. of III international conference of young scientists, students and students PARUSA-2014. — Taganrog: SFEDU, 2014. — pp. 84-87.
- Gurenko B.V., Kopylov S.A., Beresnev M.A., Development of failure diagnostic system for vehicles//Intern
ational scientific institute Educatio. — 2014. — No. 6. — p.49-50. - Gurenko, R. Fedorenko, A. Nazarkin, «Autonomous Surface Vehicle Control System,» Applied Mechanics and Materials, Vols 704, pp. 277-282, 2015, doi: 10.4028/www.scie
ntific.net/AMM.7 04.277 - A.R.Gaiduk, B.V.Gurenko, E.A.Plaksienko, I.O.Shapovalov, Development of control algorithms for an unmanned boat as a multidimensional nonlinear object // Izvestiya SFEDU. Technical sciences. – 2015. – No.1. – pp. 250 – 261.
- R.V.Fedorenko, B.V. Gurenko, Path planning for autonomous mini-ship// Inzhenerny vestnik dona. – 2015. – No.4. – url: ivdon.ru/ru/maga
zine/archive/n4y 2015/3280 - Gurenko B.V., Nazarkin A.S., Remote control for above-water robotic boat// Scientific-techn
ical conference devoted to 100th anniversary of SFEDU. Proceedings. Rostov on Don: SFEDU Publishing House, 2015. — pp. 158-159 - Kostukov V.A., Maevsky A.M., Gurenko B.V., Mathematical model of above-water mini-ship// Inzhenerny vestnik Dona. – 2015. – №4. – url: http://ivdon.ru/
ru/magazine/arch ive/n3y2015/3297 - Gaiduk, B. Gurenko, E. Plaksienko, I. Shapovalov, M. Beresnev, «Development of Algorithms for Control of Motor Boat as Multidimensional Nonlinear Object», MATEC Web of Conferences, Vol. 34, 2015, http://dx.doi.or
g/10.1051/matecc onf/20153404005 - Pshikhopov, V.a , Medvedev, M.a , Gurenko, B.b , Beresnev, M.a Basic algorithms of adaptive position-path control systems for mobile units ICCAS 2015 — 2015 15th International Conference on Control, Automation and Systems, Proceedings23 December 2015, Article number 7364878, Pages 54-59 DOI: 10.1109/ICCAS.20
15.7364878 - Pshikhopov, M. Medvedev, V. Krukhmalev,V. Shevchenko Base Algorithms of the Direct Adaptive Position-Path Control for Mobile Objects Positioning. Applied Mechanics and Materials Vol. 763 (2015) pp 110-119 © (2015) Trans Tech Publications, Switzerland. doi:10.4028/www.
scientific.net/A MM.763.110 - Fedorenko, B. Gurenko, “Local and Global Motion Planning for Unmanned Surface Vehicle”, MATEC Web of Conferences, Vol. 45, 2016, doi: http://dx.doi.or
g/10.1051/matecc onf/20164201005



