Importance
The importance of the suit is caused by the necessity for instruments to test and tune control systems, test control and planning algorithms and teach the operators. The suit is intended for use at the early stages of control and path planning systems design for marine vehicles. This reduces spendings on testing, tuning and modification during the development. The modular integration and flexibility of parameters favorably distinguish the suit comparing to the existing analogues.
Using the software modeling tools in the iterational process of control systems design for marine vehicles:
- studying the particularities of the marine vehicle’s mathematical model;
- verificaiton of the marine vehicle’s control system – checking the conformity of the specifications of the system with the preset ones, estimation of the system’s performance criteria;
- elaboration of the used mathematical models and control algorithms; and
- graphic representation of the obtained results.
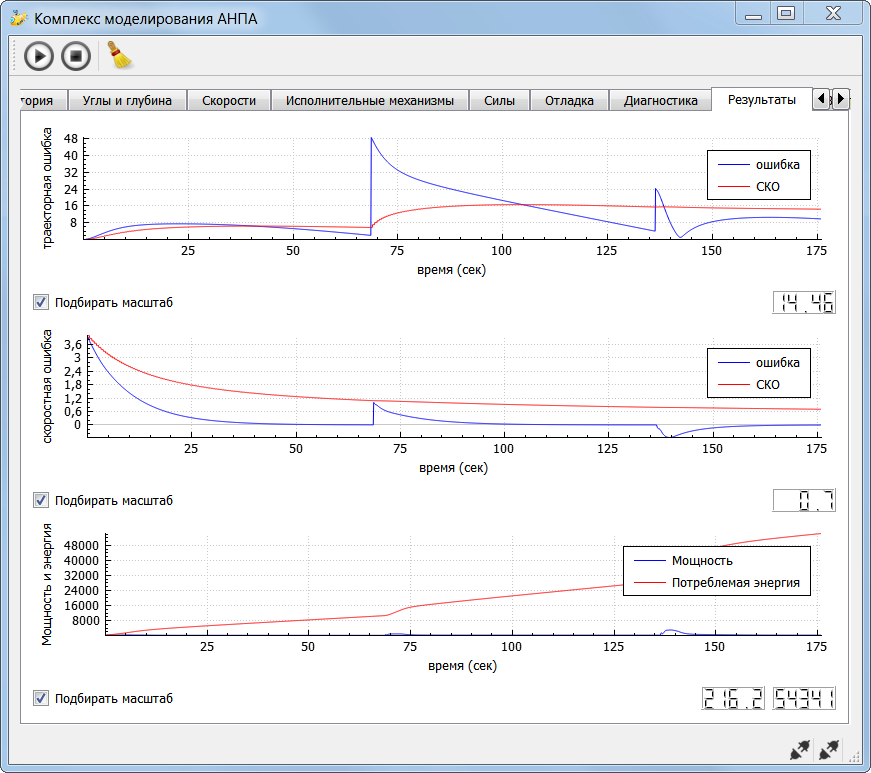
The final goal of the modeling suite is the decision making concerning the practicability and adequacy of the used algorithms and structures including the control system’s structure, controller structure, positioning and path-following, path planning algorithms, obstacle avoidance, algorithms of automated (remotely controlled) motion, crash landing algorithms, algorithms estimating external and internal structural and parametric disturbances. This decision should be based on the analysis of the obtained modeling results. These results are root-mean-square trajectory error of the vehicle, marine vehicle’s control efficiency given by a combination of the set criteria, estimation of energy parameters etc.
Proposed Solutions
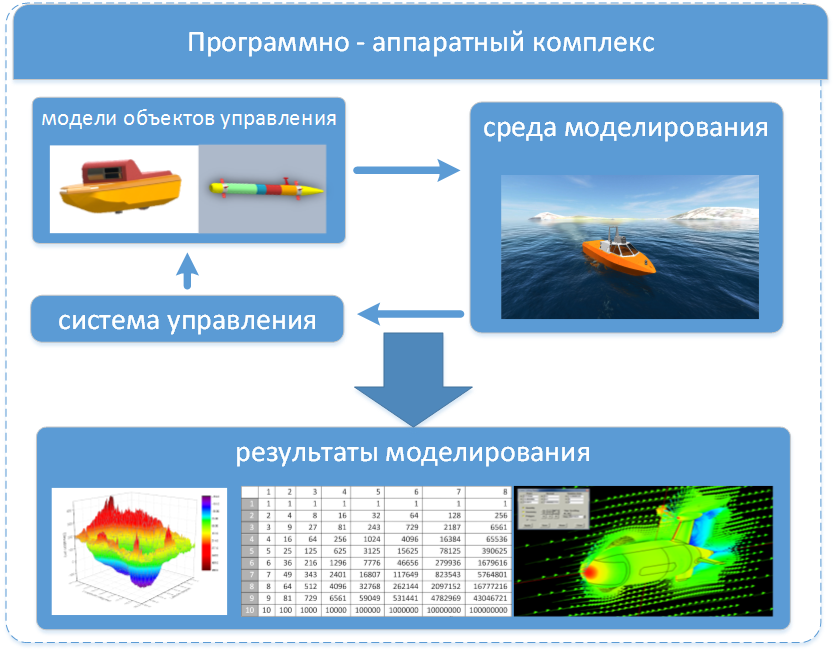
Software implementation

Software-hardware implementation.
Used methods
- control theory;
- analytical mechanics;
- matrix theory;
- analytical synthesis of nonlinear position-path systems
- vehicles control;
- building reduced Luenberger observers for nonlinear systems; and
- imitation modeling.
Generalized form of 3D scene for UAV modeling
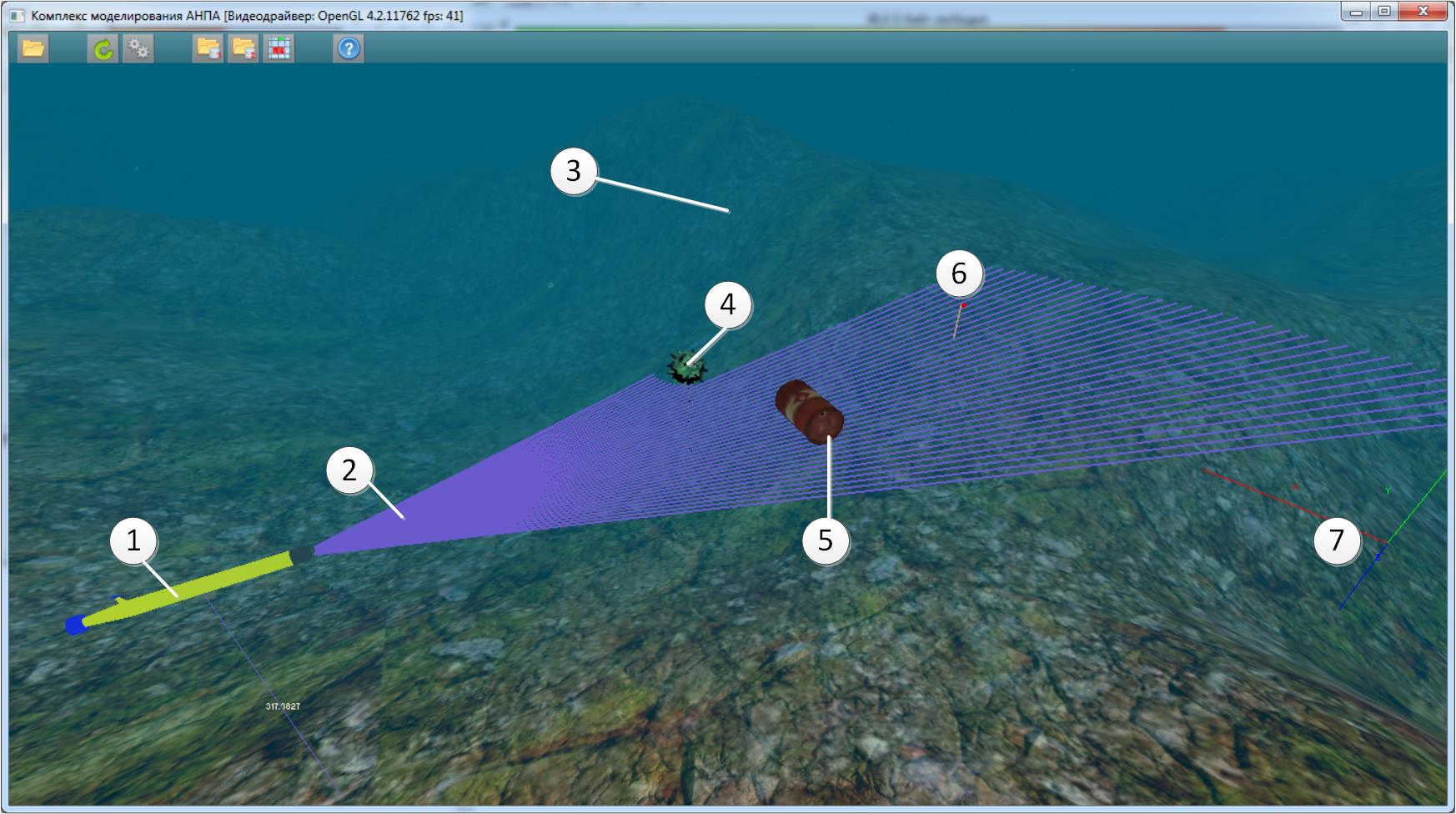
- UAV model;
- UAV sensor subsystem model;
- landscape;
- obstacle – mine;
- obstacle – barrel;
- current goal object;
- scene’s origin point;
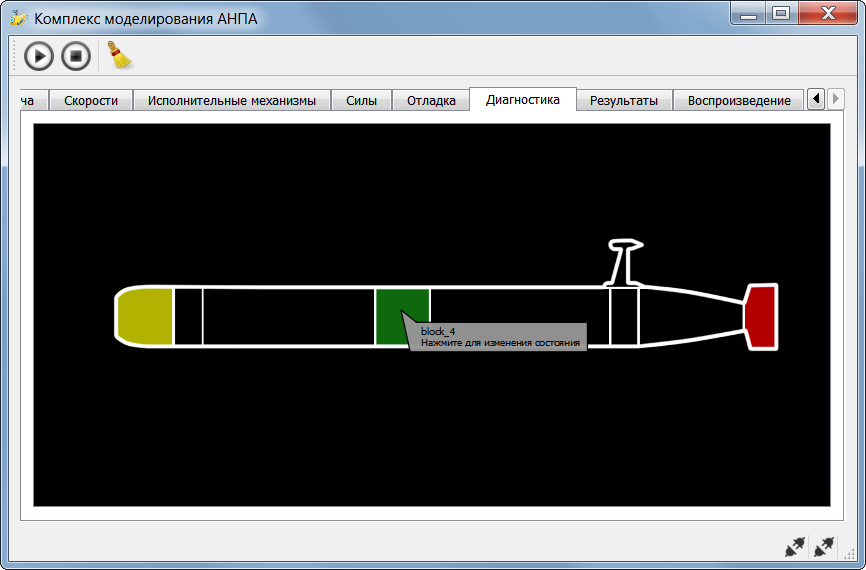
UAV diagnostic system
Structure of the UAV Modeling Suit

Initial data for marine vehicles modeling software suite:
- mathematical model;
- control actions generation law;
- motion planning algorithm;
- algorithm for estimation of parameters and disturbances;
- data about the errors of sensors of position, speed, acceleration etc., model of noises in measuring and control channels;
- environment model.
The modeling software suite provides the following functions:
- generation of a test mission;
- software implementation of the marine vehicle’s path planning algorithms;
- adjusting the basic control algorithm for work in the set mode;
- calculation of control actions using the set control law;
- transition of the calculated control actions in the marine vehicle’s model and integration of the mathematical model;
- introduction of disturbances and errors into the environment model;
- software implementation of the algorithms estimating disturbances;
- keeping the history record of the model’s state variables;
- drawing the graphs of marine vehicle’s state variables, generated control actions and other variables;
- display of 3D motion model;
- estimation of numerical modeling results: computational complexity of the algorithms implemented in the control system, energy parameters that are necessary for the designed marine vehicle etc.
Test scenes