Математическая модель надводного мини-корабля
Математическая модель мини-корабля в соответствии с системой координат имеет следующий вид: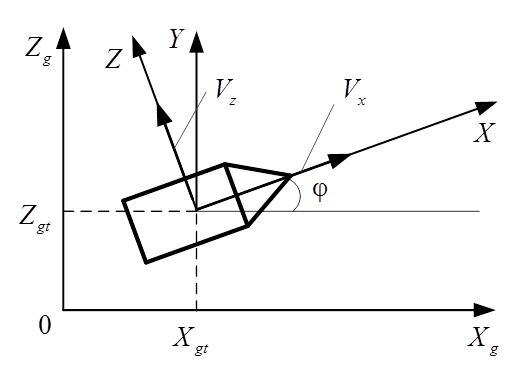


где где xg, zg – координатs центра тяжести мини-корабля в неподвижной системе координат; Vx, Vz – проекции вектора скорости на оси связанной с мини-кораблем системы координат XZY; – текущий курс
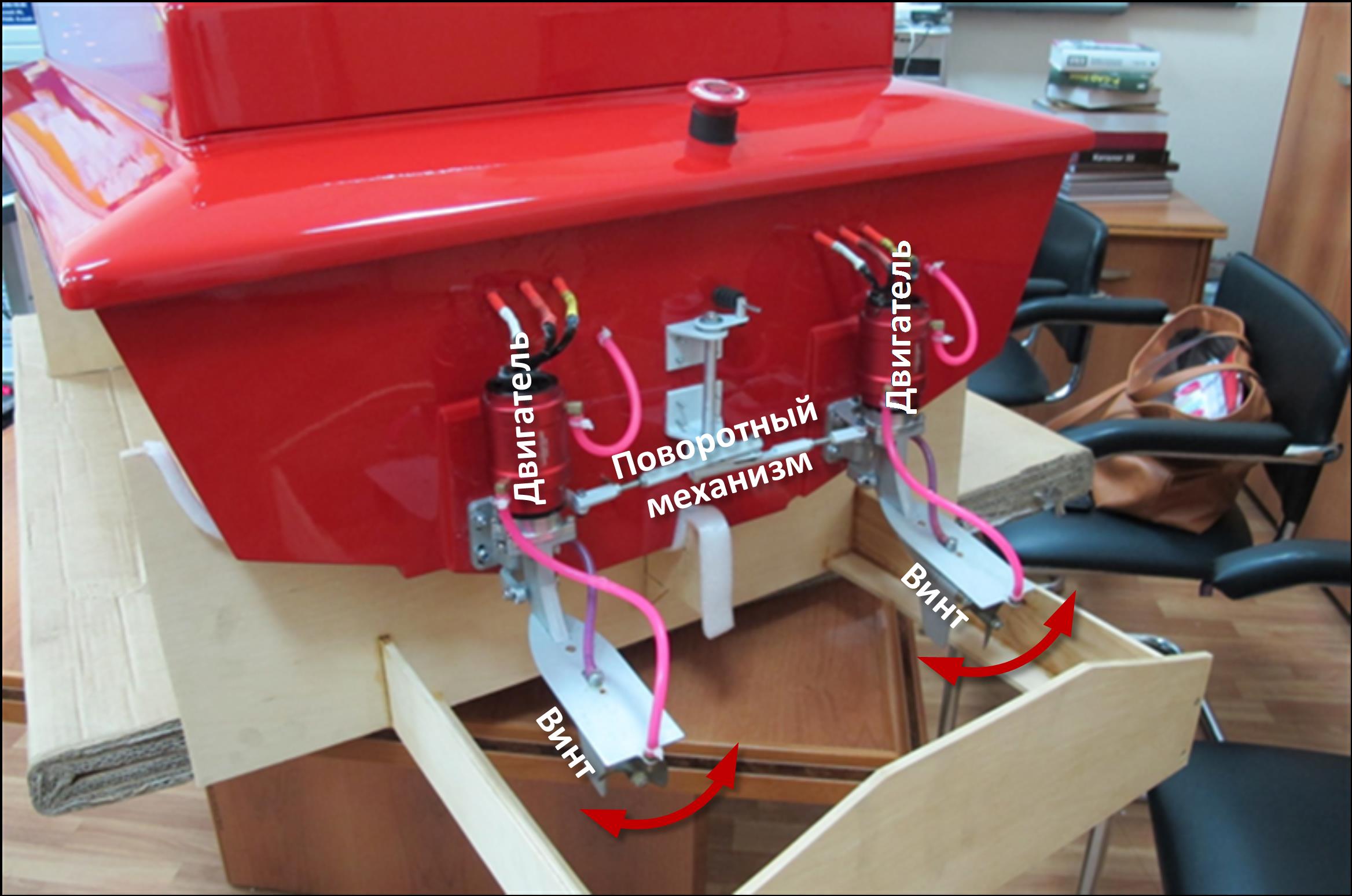
Исполнительные механизмы
Исполнительные механизмы представляют собой два движителя на основе бесколлекторных асинхронных двигателей. Двигатели и винты установлены на подвижной раме и могут отклоняться от продольной оси на одинаковый угол. Двигатели и сервопривод управляются локальными регуляторами, на входы которых подаётся ШИМ-сигнал
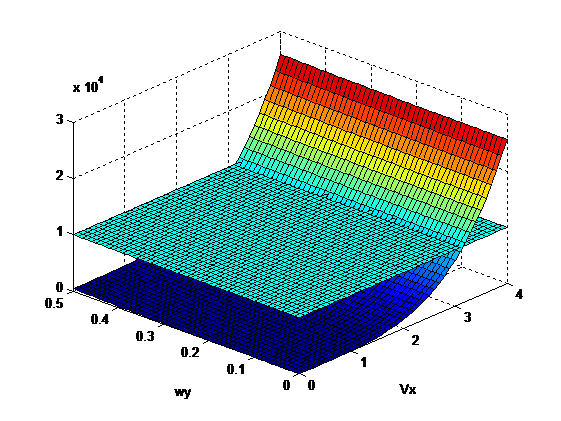
Анализ управляемости и устойчивости объекта управления
Из рисунка видно, что объект является управляемый при Vx < 3.5 м/c. При максимальной силе тяги в 100 Н, допустимая максимальная скорость движения рассматриваемого объекта управления – 3,2 м/с.
Синтез и исследование системы управления
На основе позиционно-траекторного подхода к синтезу систем управления был разработан алгоритм управления
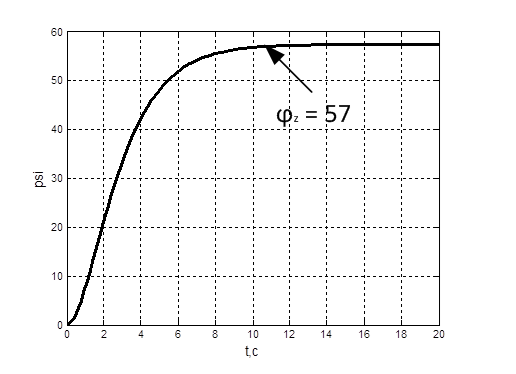
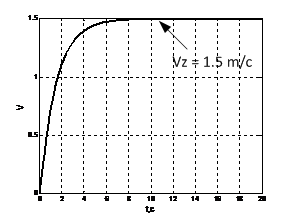
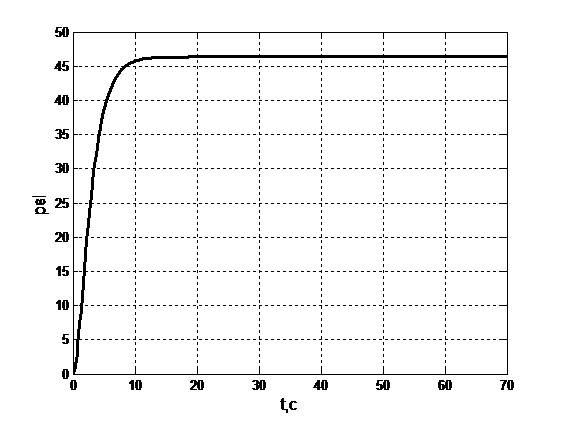
Моделирование движения при движении по заданному курсу
Мини-корабль из точки (0;0) должен двигаться по курсу 570 со скоростью Vз= 1.5 м/с.
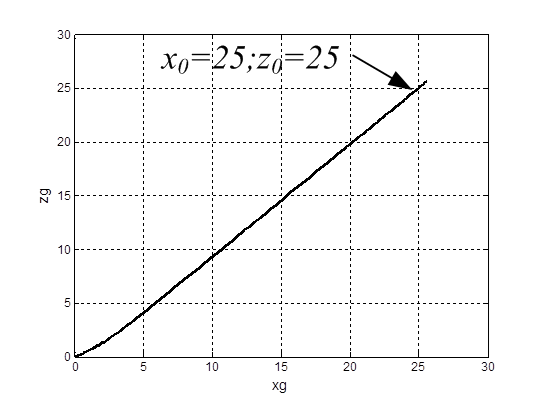
Моделирование движения при позиционировании в точку
При решении позиционной задачи мини-корабль из начального положения должен переместиться в заданную точку (x0=25;z0=25).

Структурной схема и реализация системы управления
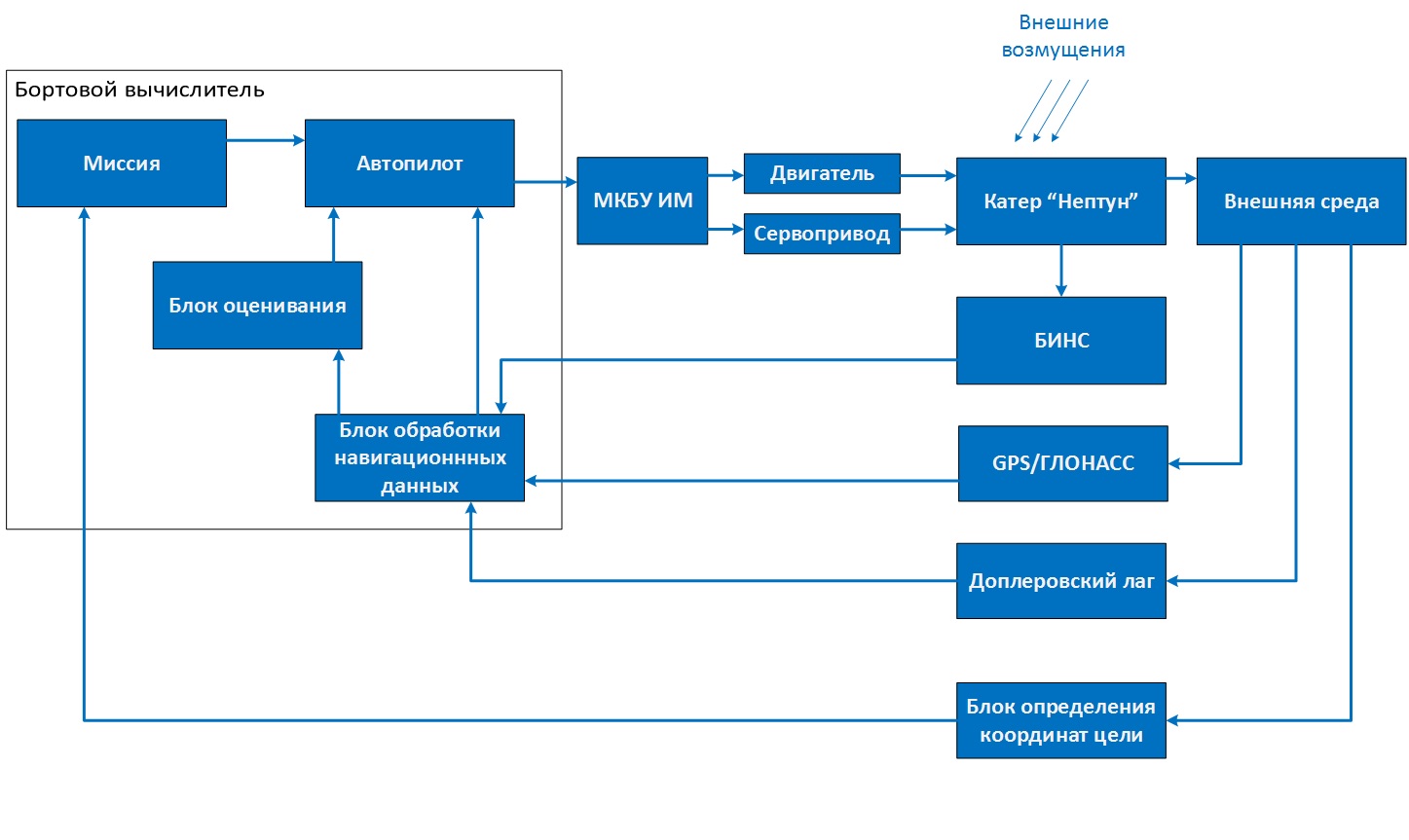
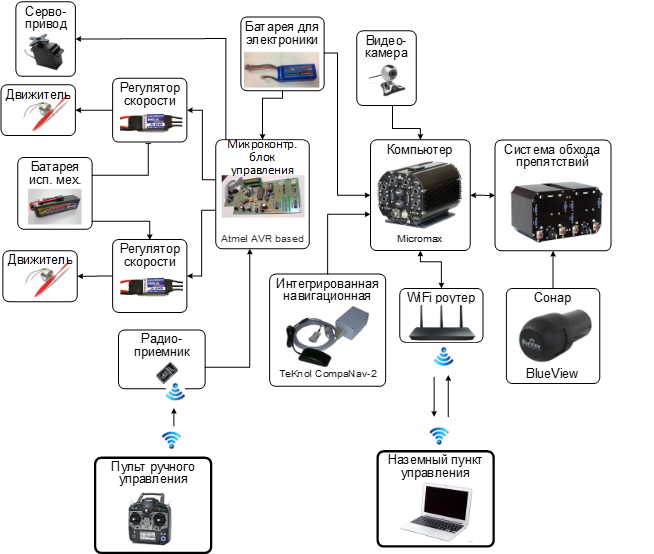
В структурной схеме системы управления надводным мини-кораблем, представленной на рисунке , миссия – это набор траекторий движения корабля и координат точек позиционирования. Автопилот формирует управляющие воздействия на основе координат точки позиционирования, которые определяют точку стыковки. Блок оценивания осуществляет оценивание внешних не измеряемых сил и моментов. Блок обработки навигационных данных комплексирует навигационные данные от БИНС и спутниковой навигационной системы GPS/ГЛОНАСС.
Микроконтроллерный блок управления исполнительными механизмами (МКБУ ИМ) преобразует управляющие воздействия автопилота в сигналы управления исполнительными механизмами. Исполнительные механизмы представляют собой два привода гребных винтов и сервопривод управления рулем поворота.
Для определения внешних возмущений среды используется блок оценивания.
Интегрированная навигационная система по приемнику GPS/Глонасс и датчикам инерциальной навигации позволяет определять положение корабля в глобальной системе координат, а так же углы ориентации судна, такие как крен, дифферент и рысканье. Доплеровский лаг определяет составляющие продольной и поперечной скорости движения судна относительно дна.
Программно-аппаратная реализация
При разработке архитектуры ПО большое внимание уделялось модульности системы и минимизации связей между модулями. Это позволило вести независимую разработку и отладку модулей, унифицировать обмен данными в системе, повысить ее предсказуемость и отказоустойчивость.
В качестве операционной системы бортового компьютера используется Ubuntu Linux. Программное обеспечение построено на базе Robot Operating System, что позволяет реализовать слабую связанность компонентов и клиент-серверный шаблон их взаимодействия. Структура программного обеспечения системы управления показана на рисунке
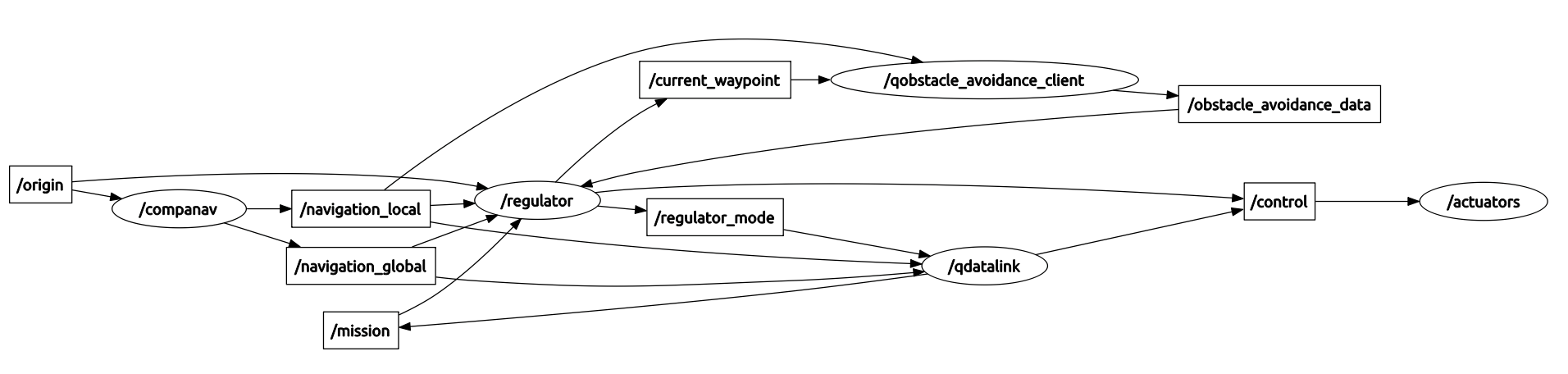
При разработке аппаратной части использована парадигма разделения вычислительной части на высокоуровневую (компьютер) и низкоуровневую (микроконтроллерный блок). Микроконтроллерный блок получает данные от компьютера или пульта дистанционного управления и генерирует ШИМ-сигнал для управления двигателями и сервоприводами. Компьютер вычисляет требуемые управляющие воздействий в соответствии с алгоритмом управления, выполняет программное обеспечение навигационной системы, и обменивается данными с наземным пунктом управления.


Оборудование, которое использовалось для реализации структуры катера и его характеристики приведены в таблице
| Оборудование | Модель |
| Бортовой компьютер | Intel Atom N270 (1.6 GHz, 512 kB L2 cache, FSB 533 MHz) |
| МКБУ ИМ | AVR-CRUMB2560, ATmega2560 |
| Доплеровский лаг | RD instruments ExplorerDVL |
| БИНС, GPS/ГЛОНАСС | Companav 2 |
| ГАНС УКБ | Evo Logic S2C R 48/78 USBL Acoustic Modem |
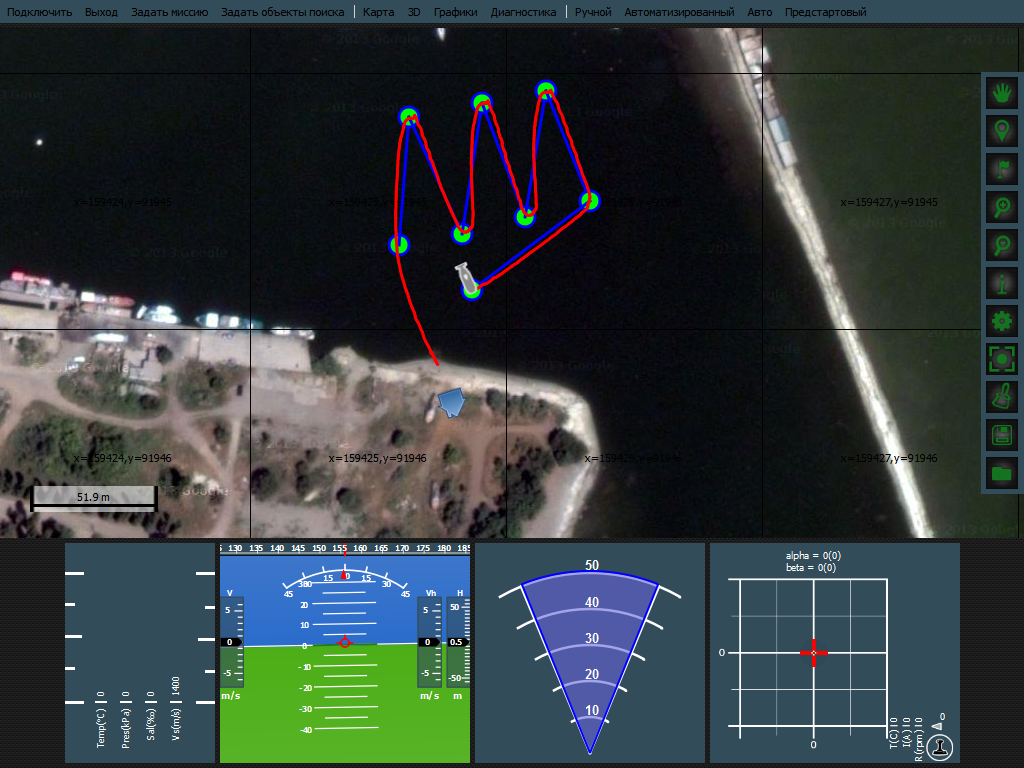
Испытания
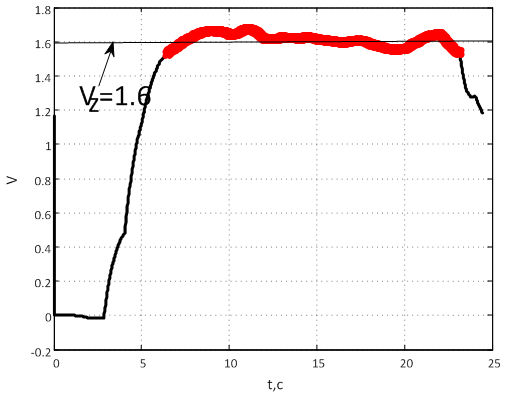
Мини-корабль должен был выйти на заданный курс (φ =1.3 рад) и заданную скорость движения (V = 1.6 м/с). График изменения курса и скорости мини-корабля при его выходе на заданную скорость с заданной ориентацией показаны на рисунках

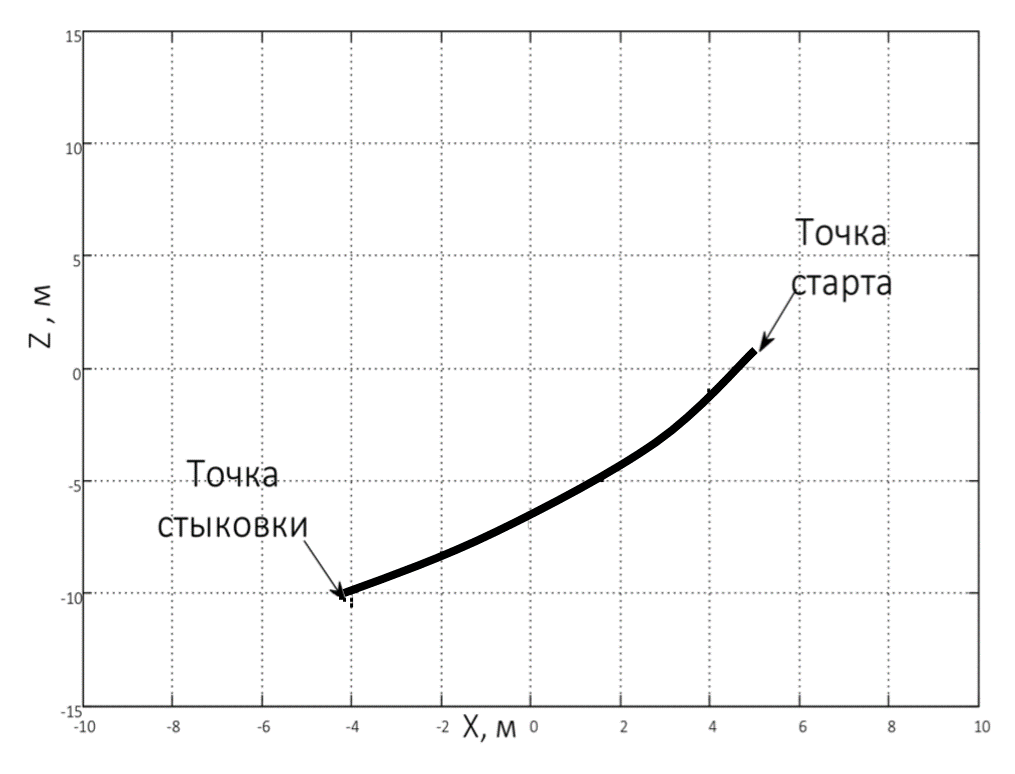
На втором этапе, мини-корабль должен переместиться из точки (x = 5;z =0) в точку (x = -4;z = -10). Результаты эксперимента приведены на рисунке
Результаты испытаний