Актуальность
Современные подводные аппараты способны выполнять широкий круг задач, в который входят экологический и климатический мониторинг, океанологические исследования, обслуживание глубоководных систем и объектов, поиск подводных месторождений, охрана акваторий и др. Все эти задачи наиболее эффективно могут быть решены в классе автономных необитаемых подводных аппаратов (АНПА), использование которых позволяет сократить эксплуатационные расходы, снизить вероятность ошибки за счет уменьшения влияния человека-оператора на процесс управления, повысить время непрерывной работы, уменьшить массогабаритные параметры подводной техники.
Применяемые методы:
- Метод построения нелинейных многосвязных математических моделей с определением гидродинамических характеристик
- Метод позиционно-траекторного управления для построении автопилотов
- Методы комплексирования навигационных данных для повышения точности определения координат
- Теория синтеза нелинейных наблюдателей для оценки неопределенных внешних сил и неизвестных параметров
- Метод конструирования интеллектуальных планировщиков перемещений для обхода стационарных и подвижных препятствий
- Метод использования неустойчивых режимов работы системы управления для обхода препятствий при минимизации требований к сенсорной подсистеме АНПА и вычислительных затрат
Предлагаемый подход к проектированию систем управления АНПА
Адекватная математическая модель движения АНПА необходима для разработки эффективной системы управления его движением в подводном режиме. Особое значение имеет адекватность математической модели при осуществлении указанных движений АНПА, как необитаемого аппарата. Корректное построение математической модели АНПА в значительной степени определяет качество проектирования системы управления движением АНПА и, в первую очередь, адекватность результатов проектирования реальным свойствам разрабатываемой системы управления.
При разработке систем автоматического управления АНПА мы придерживаемся следующей последовательности проектирования:
- Построение математической модели;
- Разработка законов и алгоритмов управления;
- Программно-аппаратная реализация системы автоматического управления.
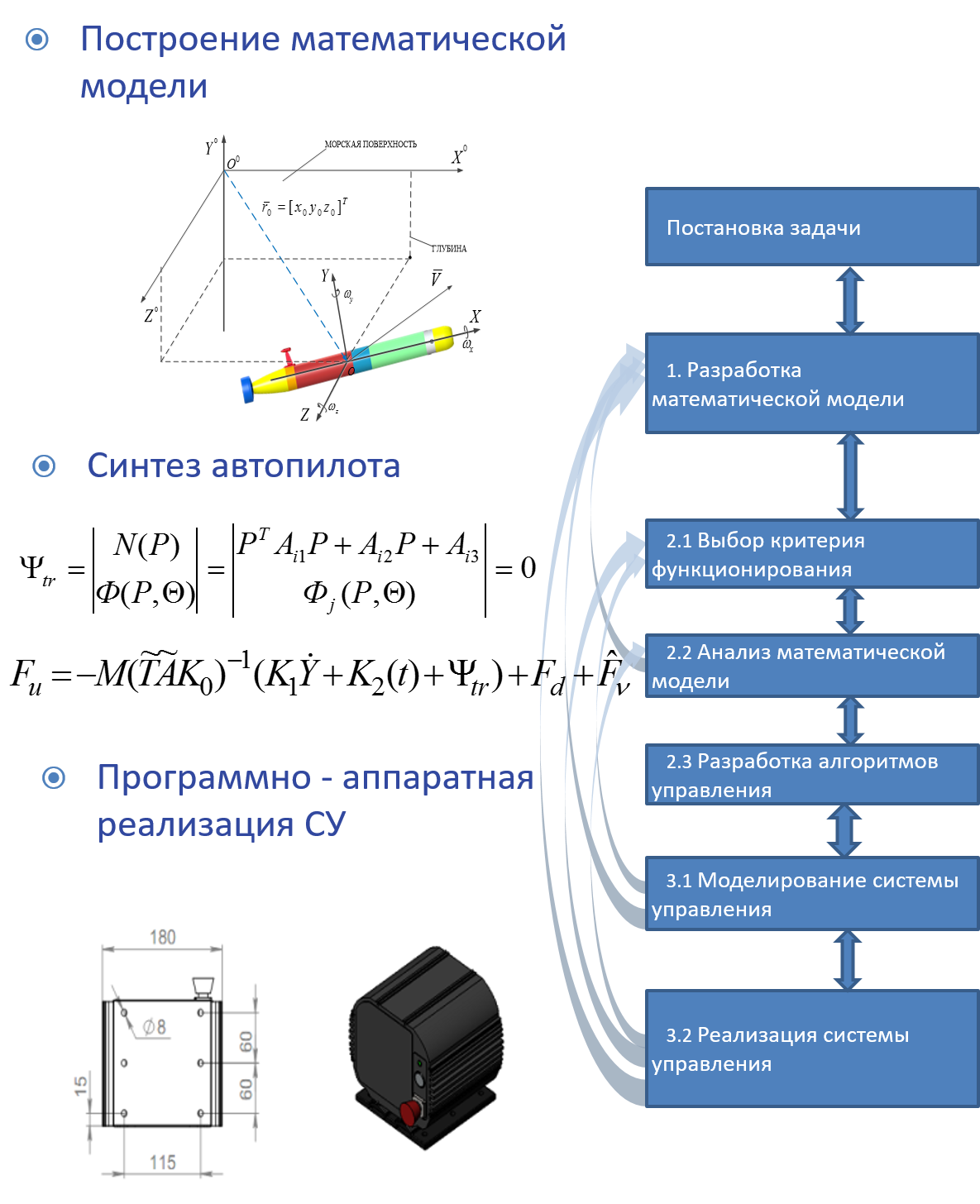
Этапы проектирования системы управления АНПА
Построение математической модели
АНПА является некоторым телом, совершающим перемещения в подводном пространстве. Поэтому для получения его модели необходимо использовать законы гидромеханики, описывающие движение тела в вязкой среде, как сопротивляющейся движению тела, так и активно воздействующей на него. Для получения функциональной модели АНПА, соединяющей в себе наилучшее сочетание альтернативных свойств, с достаточной для практических задач точностью описания объекта и максимально возможной простотой решения, принимаются обычно различные допущения. Прежде всего, такие допущения связываются с режимами длительной эксплуатации аппарата, связанными с его технологическим назначением. Обычно у АНПА можно выделить два существенно различающихся по назначению и особенностям управления режима движения:
- маршевое движение по заданной траектории;
- маневрирование, в первую очередь, погружение и всплытие, а также преодоление (обход) препятствий.
В связи с этим для первого режима приняты приведенные ниже основные допущения, состоящие в следующем:
- плавучесть АНПА не регулируется;
- главные оси инерции АНПА совпадают с его осями симметрии;
- масса АНПА , положение центра масс и центра давления в процессе штатных (не аварийных) перемещений не изменяются;
- при допустимых дальностях перемещениях АНПА сферичностью Земли можно пренебречь, что обусловливает допустимость применения Декартовых систем координат;
- АНПА имеет постоянную положительную плавучесть.
Эти допущения позволяют в качестве исходных соотношений при построении математической модели АНПА применить известные уравнения движения твердого тела в трехмерном пространстве с прямолинейными осями координат.
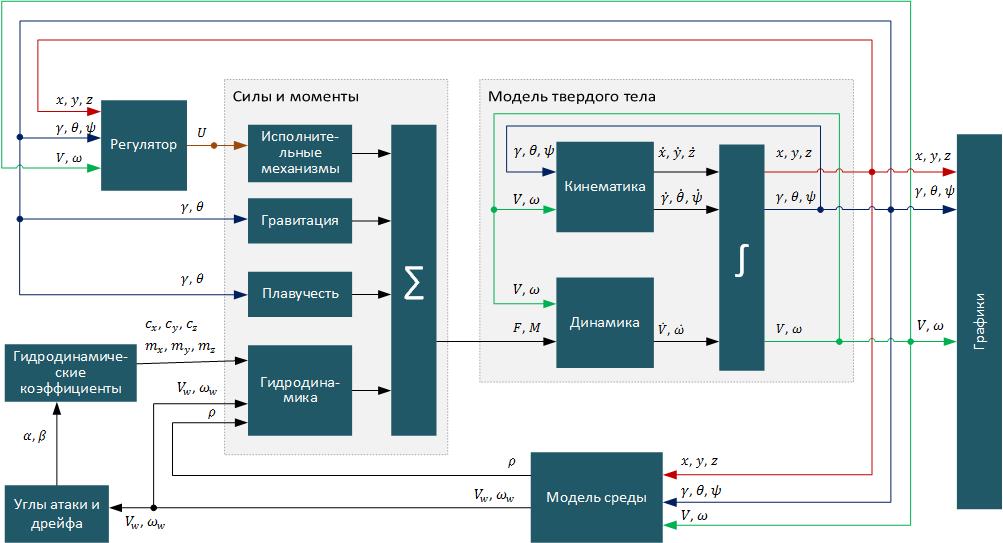
Структура математической модели АНПА
На этапе разработки математической модели получаем следующие основные результаты:
- Гидродинамические характеристики, т.е. зависимости гидродинамических сил и моментов от углов атаки и скольжениях на разных скоростях
- Системы дифференциальных уравнений, описывающих динамику и кинематику АНПА
- Математическую модель исполнительных механизмов
- Анализ управляемости АНПА
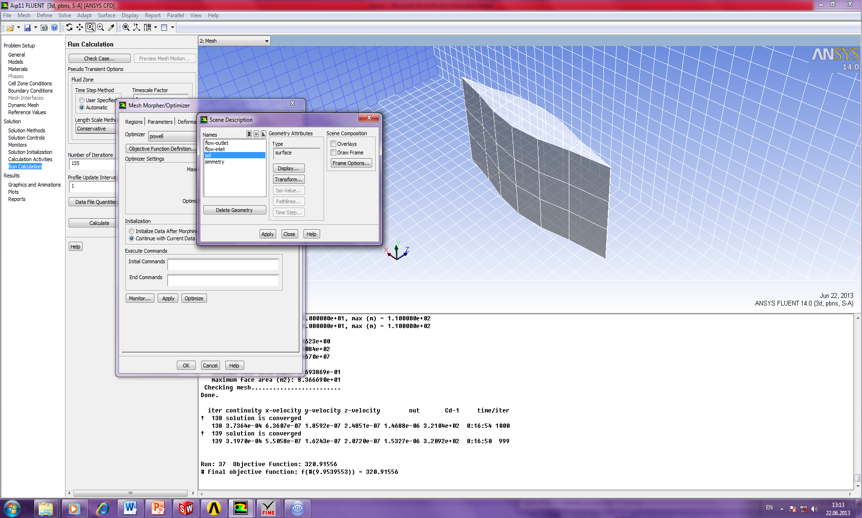
- Оптимизация облика и формы элементов корпуса путем дискретных программно-управляемых деформаций с серией CFD-расчетов для достижения минимума целевой функции


Разработка законов и алгоритмов управления
Оригинальный запатентованный алгоритм управления рассчитывает необходимые для движения по заданной миссии уставки исполнительных механизмов.
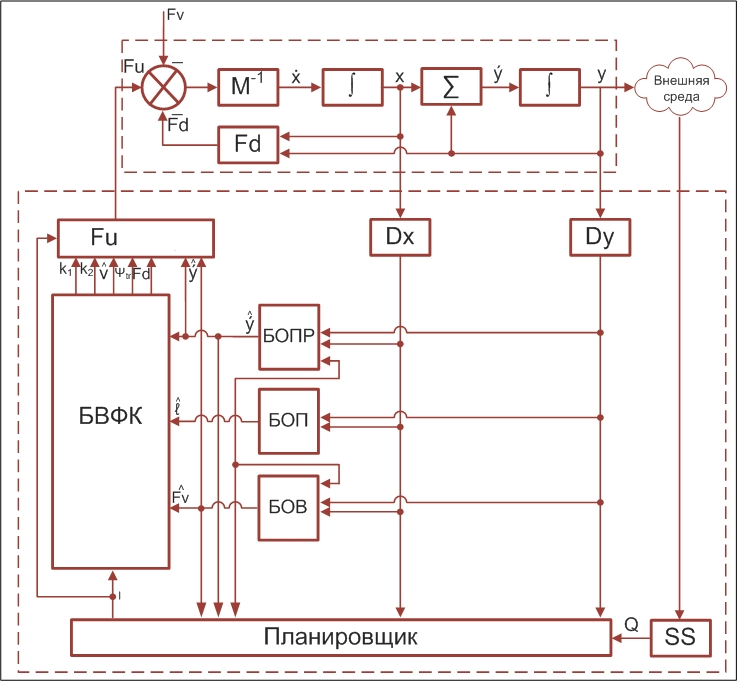
Структура замкнутой системы управления АНПА
Для выполнения своих задач, связанных с исследованием океанов и морей, АНПА должен самостоятельно перемещаться по морской поверхности, погружаться на заданную глубину или на определенное расстояние от морского дна, двигаться там по заданным траекториям, всплывать по окончании миссии и возвращаться в заданную точку на поверхности моря. Следовательно, он должен быть снабжен весьма развитой интеллектуальной, автономной системой управления движением.
Благодаря применению позиционно-траекторного подхода к управления АПНА и интеллектуальных методов планирования траектории и определению стратегии поведения АНПА удается достичь следующих результатов:
- Расширения функциональных возможностей АНПА при движении вдоль сложных пространственных траекторий с различными скоростями при наличии стационарных и подвижных препятствий.
- Повышения точности систем управления АНПА, посредством использования нелинейных методов управления и нелинейного метода комплексирования навигационных данных.
- Повышения быстродействия АНПА посредством использования оптимальных по быстродействию систем управления.
- Возможность функционирования в неформализованных средах при наличии стационарных и подвижных препятствий при отсутствии предварительного картографирования
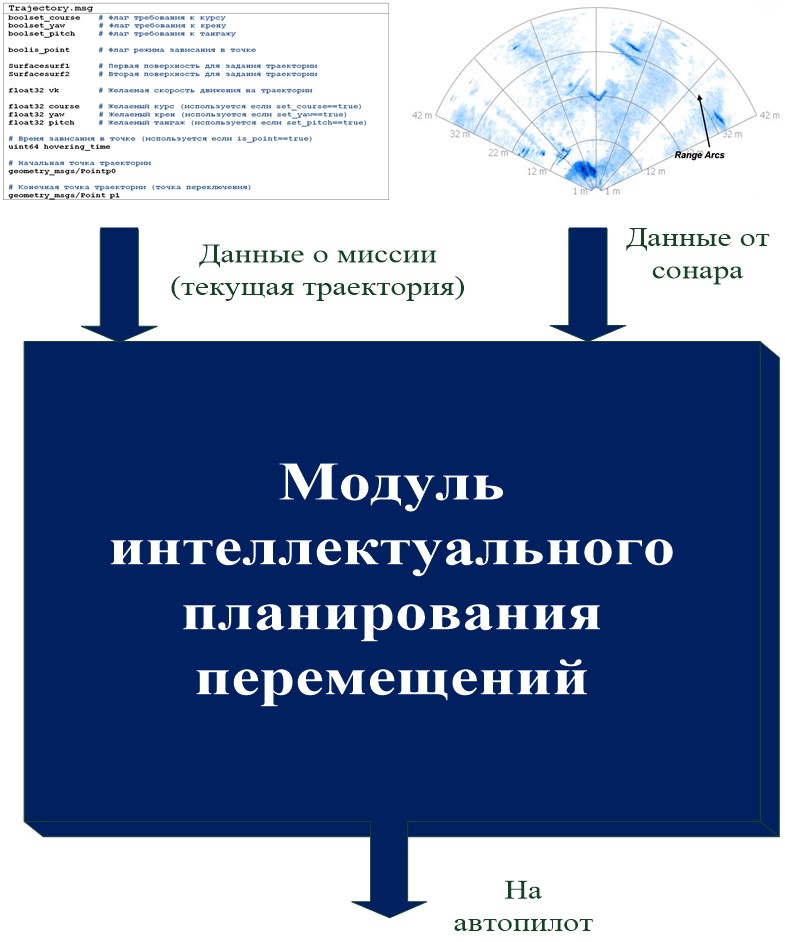
Интеллектуальный планировщик движений
Основная отличительная особенность функционирования интеллектуального АНПА заключается в том, что последовательность его действий, необходимых для достижения цели, не может быть определена заранее, поскольку информация о будущих состояниях среды, как правило, априори недоступна. Таким образом, возникает проблема выбора действий АНПА в текущей ситуации, направленного на достижение поставленной перед АНПА цели. Причем этот выбор должен быть сделан на основе информации о текущей ситуации и накопленной ранее информации о среде. Способность к оперативному выбору, т.е. планированию целенаправленного поведения в не полностью определенной ситуации, является определяющей чертой, отличающей интеллектуальный робот от других подобных систем. Именно поэтому система, обеспечивающая решение задачи планирования действий, является одной из необходимых систем в управлении АНПА.
Основными задачами, определяющими эффективное и безопасное функционирование АНПА являются:
- Задача планирования траектории;
- Задача обхода препятствий.
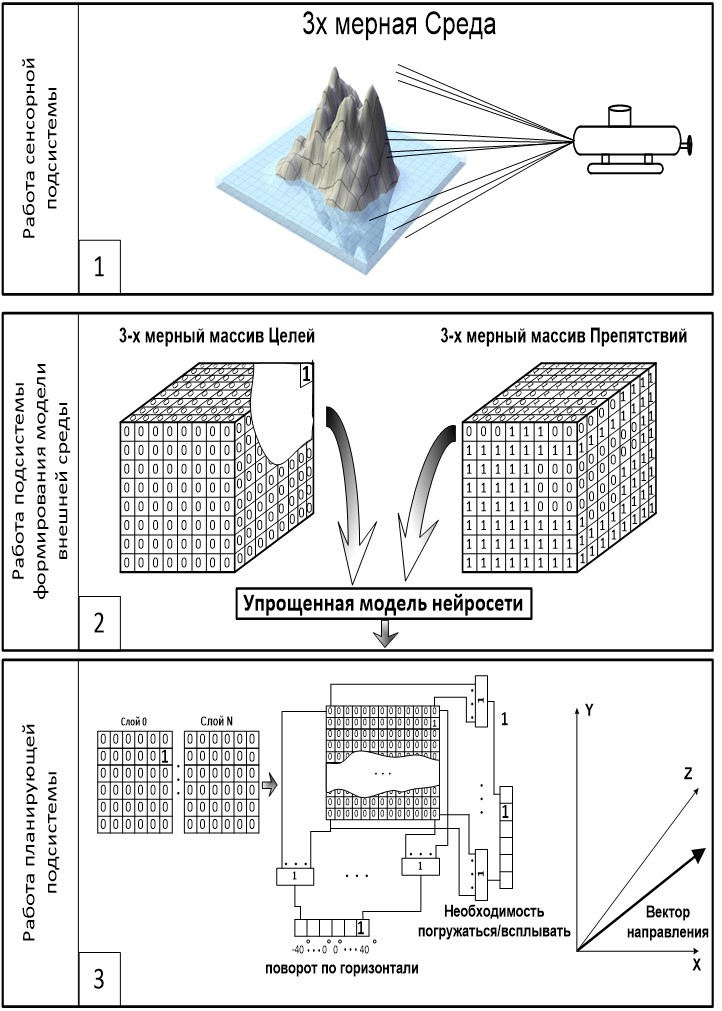
Нейросетевой планировщик
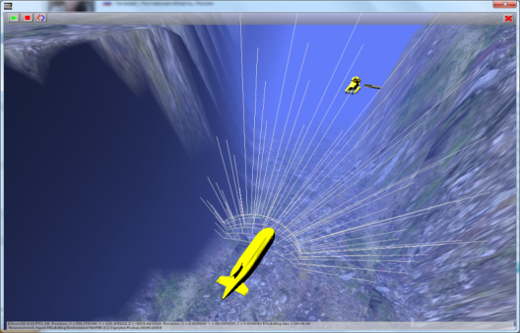
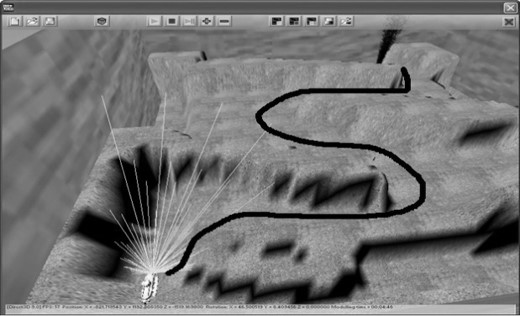
Результаты моделирования планировщика в виртуальной среде
Наблюдатель внешних возмущений
Алгоритмы оценивания предназначены для уточнения математической модели ПА и учета возмущений. В частности, математические модели деформаций, основанные на физической сущности явлений, требуют измерения таких переменных, как величина деформаций, деформирующих моментов и сил. Кроме того, требуется идентифицировать целый ряд параметров ПА. Аналогичные задачи возникают и при оценивании других возмущений, например присоединенных сил и моментов. В этой связи требуется применить такие алгоритмы оценивания, которые используют минимальное количество информации.
При выборе алгоритма оценивания учитываются следующие критерии:
– качество оценивания;
– универсальность алгоритма;
– класс наблюдаемых величин;
– количество требуемой априорной информации.

Структура наблюдателя
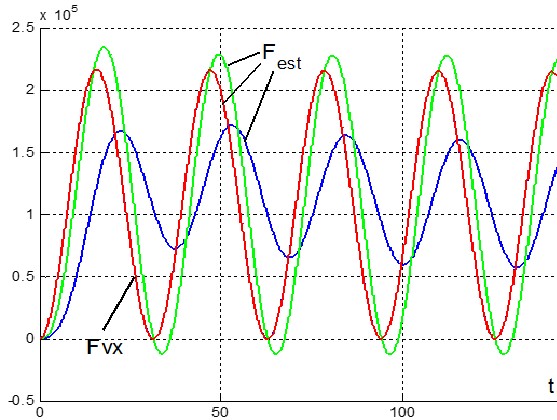

Результаты исследования наблюдателя внешних возмущений
Программно-аппаратная реализация
Прежде чем переходить к выбору отдельных элементов СУ АНПА, необходимо определить критерии функционирования системы в целом. На основе этих критериев формируются требования, в соответствии с которыми выбирается бортовое оборудование.
Основной задачей СУ является осуществление управления в автоматическом режиме АНПА, обеспечение безопасности плавания АНПА, управление их движением с учетом предупреждения столкновения с морскими объектами. Можно выделить следующие, общие для всех блоков СУ критерии:
– надежность, включающая в себя бесперебойное функционирование в заданных условиях эксплуатации;
– точность выполнения задачи;
– минимальная масса и габариты.
Исходя из этого, формируются требования аппаратной реализации блоков СУ АНПА:
– заменяемость, предполагающая возможность простой замены вышедшего из строя блока новым;
– использование максимально стандартизированных элементов при разработке блоков СУ;
– гибкость, предполагающая наличие резервных ресурсов (вычислительная мощность, каналы ввода/вывода, расширенные возможности программного интерфейса);
– компактное расположение различных электронных блоков в корпусе СУ АНПА.
Программное обеспечение бортового компьютера разработано на базе развитой операционной системы, имеет модульную иерархическую структуру. Это позволяет создавать различные сценарии его использования, удобно анализировать имеющиеся в системе данные и оперативно производить модификацию системы с использованием современных средств разработки.




Тренажерный комплекс для отработки технологий управления
Программные средства моделирования предоставляют возможность проведения имитационных экспериментов с АНПА и системой управления на основе разработанных математических моделей АНПА и алгоритмов управления, планирования и оценивания возмущений. Они должны описывать как сам АНПА с системой управления, так и внешнюю среду, нестационарность внутренних и внешних параметров, а так же случайные возмущения и помехи в каналах измерения переменных состояния системы и каналах управления.
Использование программных средств моделирования в итерационном процессе конструирования системы управления АНПА имеет целью:
- исследование особенностей математической модели АНПА;
- верификацию системы управления АНПА – проверку соответствия ее характеристик заданным, оценку показателей качества системы;
- уточнение использованных математических моделей и алгоритмов управления;
- графическое представление полученных результатов.
При построении программного комплекса моделирования движений АНПА исходными данными являются:
- математическая модель ;
- закон формирования управляющих воздействий;
- алгоритмы планировщика перемещений;
- алгоритмы оценивания параметров и возмущений;
- данные о погрешностях датчиков положения, скорости, ускорения и т.д., модели шумов в каналах измерения и управления;
- модель внешней среды.
Программный комплекс моделирования реализует следующие функции:
- формирование тестовой миссии;
- программную реализацию алгоритмов планирования траекторий АНПА;
- настройки базового алгоритма управления для работы в заданном режиме;
- расчет управляющих воздействий на основе заданного закона управления;
- передачу вычисленных управляющих воздействий в модель АНПА и интегрирование математической модели;
- введение возмущений, модели среды, погрешностей;
- программную реализацию алгоритмов оценивания возмущений;
- сохранение истории переменных состояния модели;
- построение графиков переменных состояния АНПА, выработанных управляющих воздействий и других переменных;
- отображение трехмерной модели движения;
- оценку результатов численного моделирования: вычислительной сложности алгоритмов, реализованных в системе управления, энергетических параметров, которые должен иметь проектируемый АНПА и др.
Конечной целью использования программного комплекса моделирования движений АНПА является принятие решения о целесообразности и адекватности применяемых алгоритмов и структур, в состав которых входят структура системы управления, структура регулятора, позиционирования в заданном районе и движения по заданной траектории, алгоритмы планирования движения, обхода препятствий, алгоритмы автоматизированного (дистанционно управляемого) движения, алгоритмы аварийной посадки, алгоритмы оценивания внешних и внутренних структурных и параметрических возмущений. Это решение должно основываться на анализе полученных результатов моделирования. Такими результатами являются среднеквадратическое отклонение от заданной траектории, эффективность управления АПНА, которая определяется совокупностью заданных критериев, оценка энергетических параметров и т.д.



Выполненные проекты
 Разработка интеллектуальной системы управления движением автономных необитаемых подводных аппаратов
Разработка интеллектуальной системы управления движением автономных необитаемых подводных аппаратов
Разработка системы управления типовых платформ
Разработка технического проекта ряда перспективных типовых платформ АНПА
![]()
Разработка системы управления робота-глайдера

Моделирующий комплекс отработки алгоритмов управления АНПА
Интеллектуальная собственность








Публикации
- Гуренко Б.В. Современное состояние подводной робототехники // Материалы Всероссийской научной конференции студентов и аспирантов «Робототехника, мехатроника и интеллектуальные системы». Таганрог: ТРТУ.- 2005г.- С 49-53.
- Пшихопов В.Х., Сиротенко М.Ю., Гуренко Б.В. Структурная организация систем автоматического управления подводными аппаратами для априори неформализованных сред // Информационно-измерительные и управляющие системы. М.: Радиотехника. 2006.- №1-3- Т4 — С. 73-78.*
- Гуренко Б.В. Программный комплекс для моделирования движения автономных мобильных роботов [Текст] // Сборник конкурсных работ Всероссийского смотра-конкурса научно-технического творчества студентов высших учебных заведений «Эврика-2008». Новочеркасск: Лик.- 2008. — С 384-386.
- Гуренко Б.В. Построение и исследование математической модели подводного аппарата // Специальный выпуск журнала «Вопросы оборонной техники. Серия 9», 2010 г. — С. 35-38.*
- Пшихопов В.Х., Суконки С.Я., Нагучев Д.Ш., Стракович В.В., Медведев М.Ю., Гуренко Б.В. , Костюков В.А. Автономный подводный аппарат «СКАТ» для решения задач поиска и обнаружения заиленных объектов // Известия ЮФУ. Технические науки. Тематический выпуск «Перспективные системы и задачи управления». – Таганрог: ТТИ ЮФУ.-2010.-№3(116) – С.153-163.*
- Гуренко Б.В. Синтез автопилотов для необитаемых подводных аппаратов// Сборник трудов международной конференции «Автоматизация управления и интеллектуальные системы и среды». — Нальчик: КБНЦ РАН.- Т3. 2010.-С 48-52.
- В.Х. Пшихопов, М.Ю. Медведев, Р.В. Федоренко, Гуренко Б.В. и др Управление воздухоплавательными комплексами: теория и технологии проектирования /– М.: ФИЗМАТЛИТ, 2010. – 394 с. (монография)
- Гуренко Б.В. Структурный синтез автопилотов для необитаемых подводных аппаратов // Известия Кабардино-Балкарского научного центра РАН, номер 1–2011 г.
- Гуренко Б.В., Федоренко Р.В. Комплекс моделирования движений подвижных объектов на базе воздухоплавательных и подводных аппаратов // Известия ЮФУ. Технические науки. Тематический выпуск «Перспективные системы и задачи управления». – Таганрог: ТТИ ЮФУ.- 2011.-№3(116) – С.180-186
- Гуренко Б.В. Структурная организация систем автоматического управления подводными глайдерами // Известия ЮФУ. Технические науки. Тематический выпуск «Перспективные системы и задачи управления». – Таганрог: ТТИ ЮФУ.- 2011. — №3(116) – С.199-205
- Пшихопов В.Х., М.Ю. Медведев, Б.В. Гуренко, А.А. Мазалов Адаптивное управление нелинейными объектами одного класса с обеспечением максимальной степени устойчивости // Известия ЮФУ. Технические науки. Тематический выпуск «Перспективные системы и задачи управления». – Таганрог: ТТИ ЮФУ.- 2012.-№3(116) – С.180-186
- Pshikhopov, V.Kh., Medvedev, M.Yu., Gaiduk, A.R., Gurenko, B.V., Control system design for autonomous underwater vehicle, 2013, Proceedings — 2013 IEEE Latin American Robotics Symposium, LARS 2013, pp. 77-82, doi:10.1109/LARS.2013.61.
- Kh. Pshikhopov, M. Y. Medvedev, and B. V. Gurenko, “Homing and Docking Autopilot Design for Autonomous Underwater Vehicle”, Applied Mechanics and Materials. Vols. 490-491, pp. 700-707, 2014, doi:10.4028/www.scientific.net/AMM.490-491.700.
- Pshikhopov, V.K., Fedotov, A.A., Medvedev, M.Y., Medvedeva, T.N. & Gurenko, B.V. 2014, «Position-trajectory system of direct adaptive control marine autonomous vehicles», 2014 the 4th International Workshop on Computer Science and Engineering — Summer, WCSE 2014.
- Pshikhopov, V., Chernukhin, Y., Fedotov, A., Guzik, V., Medvedev, M., Gurenko, B., Piavchenko, A., Saprikin, R., Pereversev, V. & Krukhmalev, V. 2014, «Development of intelligent control system for autonomous underwater vehicle», 2014 the 4th International Workshop on Computer Science and Engineering-Winter, WCSE 2014.
- Пшихопов В.Х, Медведев М.Ю., Федоренко Р.В., Гуренко Б.В., Чуфистов В.М., Шевченко В.А. Алгоритмы многосвязного позиционно-траекторного управления подвижными объектами // Инженерный вестник дона #4, 2014, url:ivdon.ru/ru/magazine/archive/N4y2014/2579 (доступ свободный) – Загл. с экрана. – Яз. рус.
- Пшихопов В.Х., Медведев М.Ю., Костюков В.А., Гайдук А.Р., Федоренко Р.В., Гуренко Б.В., Крухмалев В.А., Медведева Т.Н. Проектирование роботов и робототехнических систем: Учебное пособие – Ростов-на-Дону: Изд-во ЮФУ, 2014. – 195 с.
- Пшихопов В.Х, Федотов А.А, Медведев М.Ю., Медведева Т.Н., Гуренко Б.В., Позиционно-траекторная система прямого адаптивного управления морскими подвижными объектами // Инженерный вестник дона #3, 2014, url:ivdon.ru/ru/magazine/archive/n3y2014/2496 (доступ свободный) – Загл. с экра-на. – Яз. рус.
- Гуренко Б.В. Построение и исследование математической модели автономного необитаемого подводного аппарата // Инженерный вестник дона #4, 2014, url:ivdon.ru/ru/magazine/archive/N4y2014/2626 (доступ свободный) – Загл. с экра-на. – Яз. рус.
- Пшихопов В.Х., Чернухин Ю.В., Федотов А.А., Гузик В.Ф., Медведев М.Ю., Гуренко Б.В., Пьявченко А.О., Сапрыкин Р.В., Переверзев В.А., Приемко А.А. Разработка интеллектуальной системы управления автономного подводного аппарата // Известия ЮФУ. Технические науки. Таганрог: ТТИ ЮФУ – 2014. – № 3(152). – С. 87 – 101.
- Пшихопов В.Х., Гуренко Б.В., Медведев М.Ю., Маевский А.М., Голосов С.П. Оценивание аддитивных возмущений АНПА робастным наблюдателем с нелинейными обратными связями // Известия ЮФУ. Технические науки. Таганрог: ТТИ ЮФУ – 2014. – № 3(152). – С. 128 – 137.
- Пшихопов В.Х., Федотов А.А., Медведев М.Ю., Медведева Т.Н., Гуренко Б.В., Задорожный В.А. Позиционно-траекторная система прямого адаптивного управления морскими подвижными объектами // Сборник материалов Девятой Всероссийской научно-практической конференции «Перспективные системы и задачи управления». Таганрог. Изд-во ЮФУ, 2014. – С. 356 – 263.
- Гуренко Б.В., Федоренко Р.В., Береснев М.А., Сапрыкин Р.В., Переверзер В.А., Разработка симулятора автономного необитаемого подводного аппарата // Инженерный вестник дона #3, 2014, http://ivdon.ru/ru/magazine/archive/n3y2014/2504. (доступ свободный) – Загл. с экрана. – Яз. рус.
- Копылов С.А., Федоренко Р.В., Гуренко Б.В., Береснев М.А. Программный комплекс для обнаружения и диагностики аппаратных отказов в роботизированных морских подвижных объектах // Инженерный вестник дона #3, 2014, url:ivdon.ru/ru/magazine/archive/n3y2014/2526. (доступ свободный) – Загл. с экрана. – Яз. рус.
- Gurenko, «Mathematical Model of Autonomous Underwater Vehicle,» Proc. of the Second Intl. Conf. on Advances In Mechanical and Robotics Engineering — AMRE 2014, pp. 84-87, 2014, doi:10.15224/ 978-1-63248-031-6-156
- Гайдук А.Р. Плаксиенко Е.А. Гуренко Б.В. К синтезу систем управления с частично заданной структурой // Научный вестник НГУ. Новосибирск, №2(55) 2014, С. 19-29.
- Гайдук А.Р., Пшихопов В.Х., Плаксиенко Е.А., Гуренко Б.В. Оптимальное управление нелинейными объектами с применением квазилинейной формы // Наука и образование на рубеже тысячелетий. Сб. научн.-исслед. работ КГТИ. Вып.1, Кисловодск. 2014 с 35-41
- Береснев М.А., Береснев А.Л., Гуренко Б.В. Особенности выбора типа силовой установки для автономных морских роботизированных систем // Сборник н. трудов по итогам м. н-п.к. «Современный взгляд на проблемы технических наук». — Уфа, 2014. – С. 9-11.
- Гуренко Б.В., Копылов С.А., Береснев М.А. Разработка схемы диагностики отказов подвижных объектов // Международный научный институт Educatio. — 2014. — №6. — с.49-50.
- Pshikhopov, Y. Chernukhin, V. Guzik, M. Medvedev, B. Gurenko, A. Piavchenko, R. Saprikin, V. Pereversev, V. Krukhmalev, «Implementation of Intelligent Control System for Autonomous Underwater Vehicle,» Applied Mechanics and Materials, Vols 701 — 702, pp. 704-710, 2015, doi: 10.4028/www.scientific.net/AMM.701-702.704
- Б.В. Гуренко Разработка алгоритмов сближения и стыковки автономного необитаемого подводного аппарата с подводной станцией базирования // Известия ЮФУ. Технические науки. – 2015. – № 2. – С. 162 – 175.
- Пшихопов В.Х., Медведев М.Ю., Гуренко Б.В. Алгоритмы адаптивных позиционно-траекторных систем управления подвижными объектами Проблемы управления, М.: – 2015 г., вып. 4, С. 66 –76 .
- Gurenko, R.Fedorenko, M.Beresnev, R. Saprykin, «Development of Simulator for Intelligent Autonomous Underwater Vehicle», Applied Mechanics and Materials, Vols. 799-800, pp. 1001-1005, 2015, doi: http://dx.doi.org/10.4028/www.scientific.net/AMM.799-800.1001
- Б.В. Гуренко, А.С. Назаркин Реализация и идентификация параметров автономного необитаемого подводного аппарата типа глайдер // инженерный вестник Дона. – 2015. – №4. – url: ivdon.ru/ru/magazine/archive/n4y2015/3288
- Костюков В.А., Кульченко А.Е., Гуренко Б.В. Методика расчета гидродинамических коэффициентов АНПА // Инженерный вестник Дона. – 2015. – №3. – url: ivdon.ru/ru/magazine/archive/n3y2015/3226
- Pshikhopov, M. Medvedev, B. Gurenko, «Development of Indirect Adaptive Control for Underwater Vehicles Using Nonlinear Estimator of Disturbances», Applied Mechanics and Materials, Vols. 799-800, pp. 1028-1034, 2015, doi:10.4028/www.scientific.net/AMM.799-800.1028
- Gurenko, A. Beresnev, «Development of Algorithms for Approaching and Docking Underwater Vehicle with Underwater Station «, MATEC Web of Conferences, Vol. 26, 2015, doi: dx.doi.org/10.1051/matecconf/2015260400
- Gurenko, R.Fedorenko, M.Beresnev, R. Saprykin, «Development of Simulator for Intelligent Autonomous Underwater Vehicle», Applied Mechanics and Materials, Vols. 799-800, pp. 1001-1005, 2015, doi: http://dx.doi.org/10.4028/www.scientific.net/AMM.799-800.1001
- Пшихопов В.Х., Гуренко Б.В. Разработка математических моделей подводных аппаратов: учебное пособие. – Таганрог: Изд-во ЮФУ, 2015. – 46 с
- Костюков В.А., Кульченко А.Е., Гуренко Б.В. Процедура исследования параметров модели подвижного подводного объекта // Сб. ст. по материалам XXXVI-XXXVII междунар. науч.-практ. конф. № 11-12 (35). — Новосибирск: Изд. АНС «СибАК», 2015. — с.75-59
- Kostukov, A. Kulchenko, B. Gurenko, «A hydrodynamic calculation procedure for UV using CFD», in proceedings of International Conference on Structural, Mechanical and Materials Engineering (ICSMME 2015), 2015, doi:10.2991/icsmme-15.2015.40
- Б.В. Гуренко, И.О. Шаповалов, В.В. Соловьев, М.А. Береснев Построение и исследование подсистемы планирования траектории перемещения для системы управления автономным подводным аппаратом // Инженерный вестник Дона. – 2015. – №4. – url: ivdon.ru/ru/magazine/archive/n4y2015/3383
- Pshikhopov, V.a , Medvedev, M.a , Gurenko, B.b , Beresnev, M.a Basic algorithms of adaptive position-path control systems for mobile units ICCAS 2015 — 2015 15th International Conference on Control, Automation and Systems, Proceedings23 December 2015, Article number 7364878, Pages 54-59 DOI: 10.1109/ICCAS.2015.7364878
- Pshikhopov, M. Medvedev, V. Krukhmalev,V. Shevchenko Base Algorithms of the Direct Adaptive Position-Path Control for Mobile Objects Positioning. Applied Mechanics and Materials Vol. 763 (2015) pp 110-119 © (2015) Trans Tech Publications, Switzerland. doi:10.4028/www.scientific.net/AMM.763.110
- Пшихопов В.Х., Гуренко Б.В., Федоренко Р.В., Программное обеспечение бортовой адаптивной системы управления автономного необитаемого подводного аппарата (Зарегистрировано в Реестре программ для ЭВМ 11 января 2016 г) (рег. № 2016610059 от 11.01.2016)
- Vyacheslav Pshikhopov, Boris Gurenko, Maksim Beresnev, Anatoly Nazarkin IMPLEMENTATION OF UNDERWATER GLIDER AND IDENTIFICATION OF ITS PARAMETERS Jurnal Teknologi Vol 78, No 6-13 DOI: http://dx.doi.org/10.11113/jt.v78.9281







