Importance
The modern underwater vehicles are capable of performing a wide circle of tasks including ecological and climate monitoring, ocean studies, treatment of deep water systems and objects, search for underwater deposits, guarding water areas etc. All these tasks can be most effectively solved in the class of AUVs that can allow for reduction of operation costs, reduce that probability of errors by reduction of human influence on the control process, increase the time of continuous work and reduce the mass and size of the underwater machines.
Used methods:
- Method of building nonlinear multiply connected mathematical models with determining the hydrodynamic parameters.
- Method of position-path control for building autopilots.
- Method of navigation data aggregation for increasing accuracy of determining coordinates.
- Theory of synthesis of nonlinear observers for estimation of undetermined external forces and unknown parameters.
- Method of design of intelligent motion planners for avoiding stationary and mobile obstacles.
- Method of using unstable modes of the control system for avoiding obstacles and minimization of requirements to sensor subsystem of AUV and reduction of computational costs.
Proposed approach to AUV control
Adequate mathematical model of AUV motion is necessary for development of an effective system controlling its underwater motion. Its adequacy is of crucial importance for performing the mentioned motions of the AUV. A correct building of the mathematical model influences the quality of the designed AUV motion control system and guaranties adequacy of the control system’s design to the qualities of the real system.
During the development of AUV control system we were following the steps presented below.
- Building mathematical model;
- Development of control laws and algorithms;
- Software-hardwar
e implementation of the automatic control system.
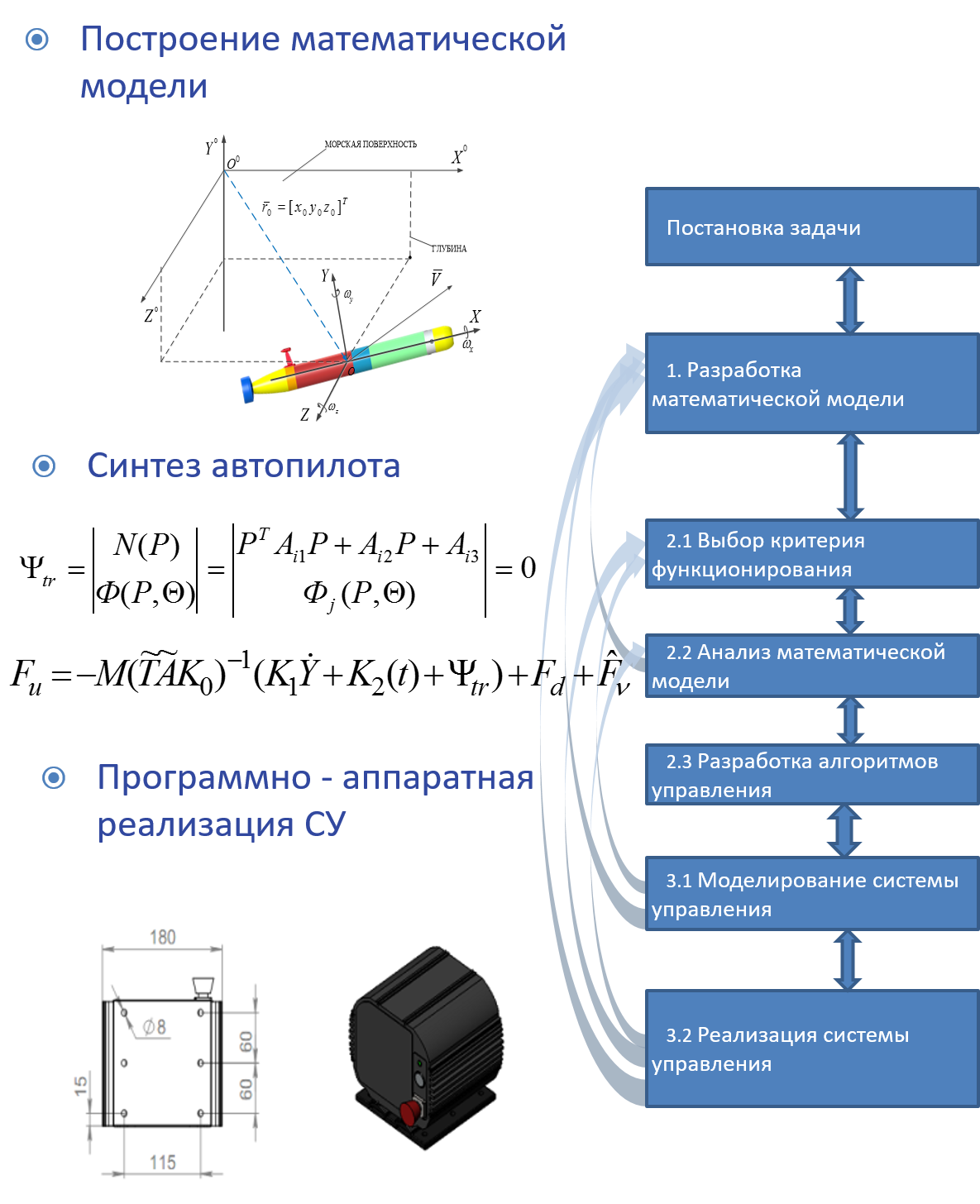
UAV Control System Design Stages
Building mathematical model
UAV is a body moving under water. So in order to obtain its model we should use the laws of hydrodynamics describing motion of a body in a viscous environment inhibiting the motion and acting on it. Various assumptions are usually made to obtain a functional model of a UAV, which should combine various qualities and describe the object with sufficient accuracy while remaining simple. Such assumptions are related to long-term operation of the vehicle according to its purpose. Usually UAV has two essentially different motion modes concerning purpose and control features:
- motion along a preset trajectory;
- maneuvering – mainly diving, surfacing, and obstacle avoidance.
For the first mode the following assumptions are made:
- UAV buoyancy is in not controlled;
- The main axes of inertia of the UAV correspond to its axes of symmetry.
- UAV mass and locations of the mass center and of the center of pressure don’t change during regular (non-emergency) motions.
- For the allowed distances it is possible to neglect the sphericity of the earth giving the possibility to use a Cartesian system of coordinates;
- UAV has constant positive buoyancy.
These assumptions let us start building the UAV mathematical model using the known equations of a solid body motion in a 3D space with straight coordinate axes.
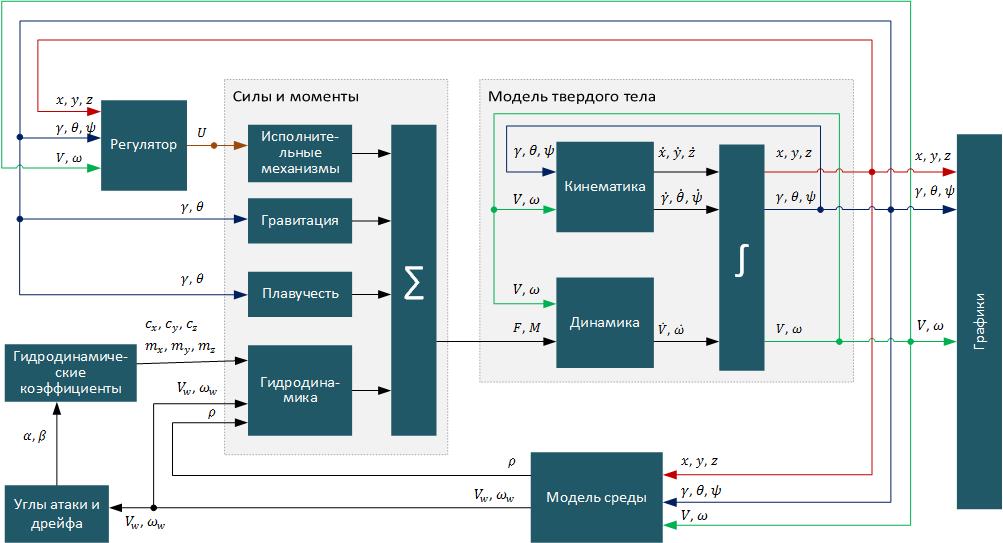
Structure of the UAV mathematical model.
At the stage of development of the mathematical model we obtain the following main results:
- Hydrodynamic parameters, i.e. relations of the hydrodynamic forces and torques to the attach angles and slip at various speeds
- Systems of differential equations describing dynamics and kinematics of the UAV.
- Mathematical model of the actuators.
- UAV controllability analysis.
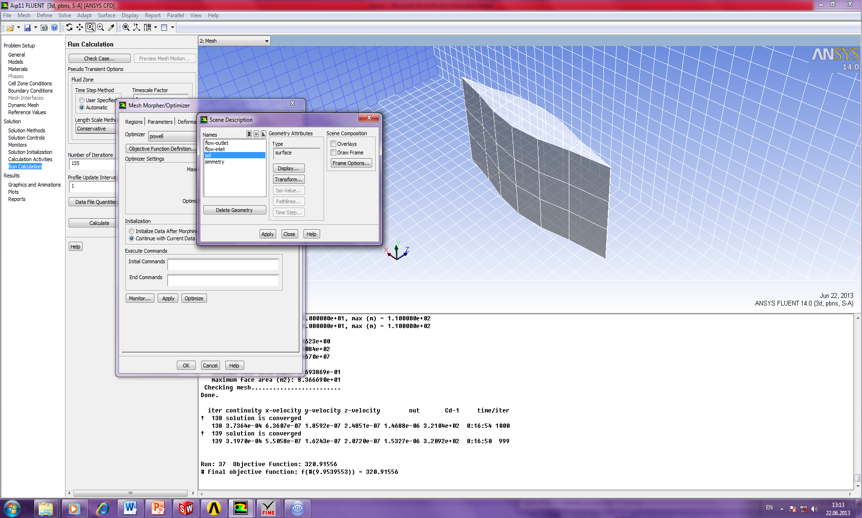
- Optimization of the appearance and of the hull by means of discrete software controlled deformations with a series of CFD for reaching the minimum of the purpose function.


Development of laws and control algorithms
A unique patented control algorithm generates the reference values for the actuators ensuring motion according to the current mission.
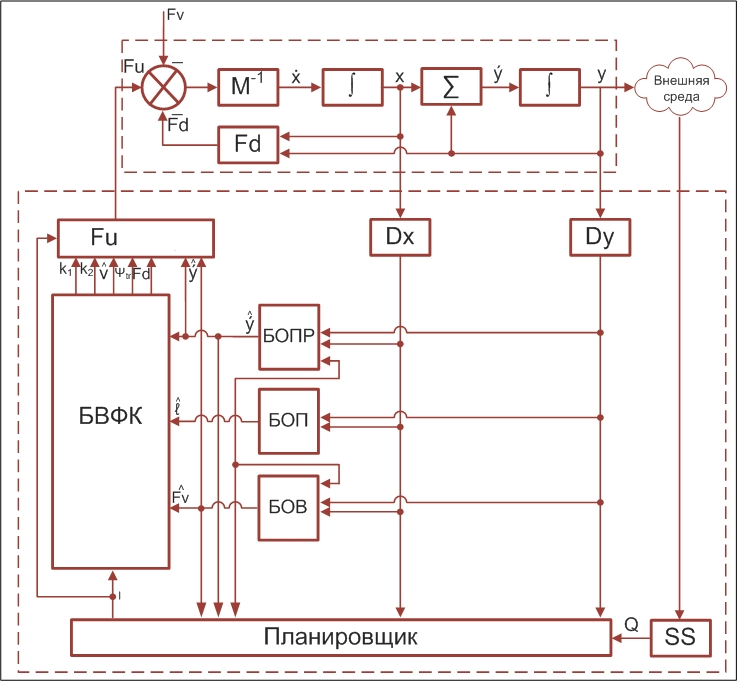
Structure of the UAV closed-loop control system
For performing the tasks related to the ocean and marine research, UAV should move independently along the water surface, dive into the water to a certain depth or to a certain distance from the seabed, move along the certain paths, surface after the end of the mission, and return the a certain point of the sea surface. So it should have a rather developed autonomous motion control system.
By means of using position-path control approach and intelligent planning and strategy building methods, the following results can be achieved:
- Extension of operational capabilities of UAVs during motion along complicated space trajectories with various speeds at presence of stationary and mobile obstacles.
- Increasing the accuracy of UAV control by means of using nonlinear control methods and a nonlinear method of aggregation of navigational data.
- Increasing the UAV speed by using speed-optimal control systems.
- Capability of operation in non-formalized environments at presence of stationary and mobile obstacles without preliminary mapping.
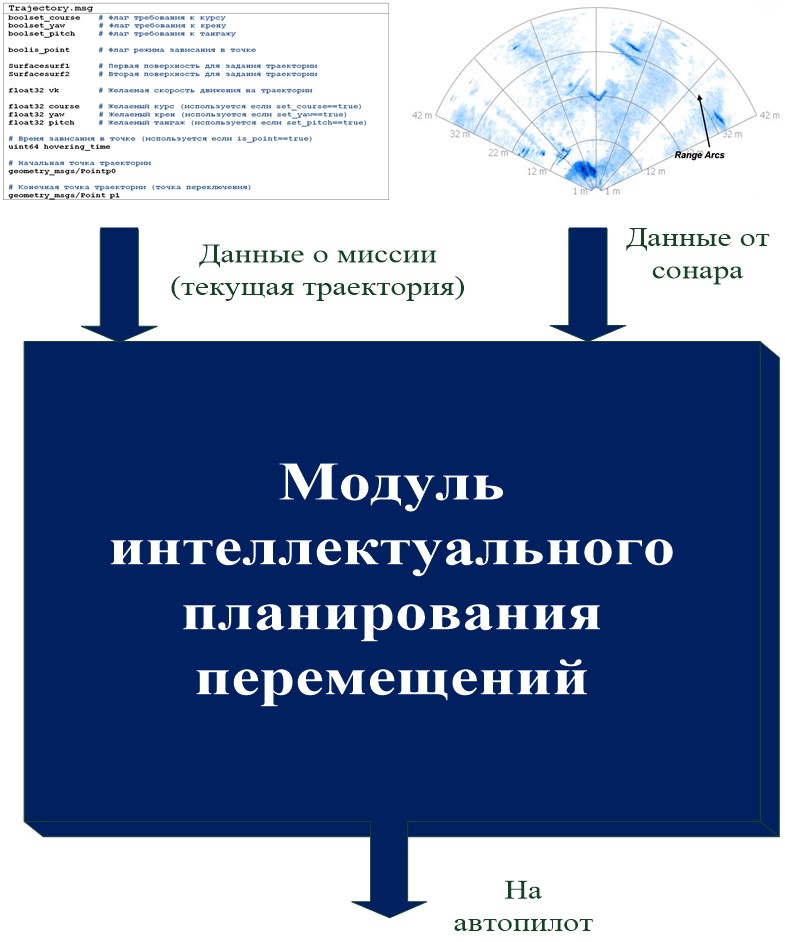
Intelligent motion planner
The main distinctive feature of UAV operation is that the succession of its motions towards the goal can’t be defined in advance because there is no a-priory information about the future states of the environment. So there is a problem of selecting the UAV actions in a current situation – the actions necessary to reach the goal. This selection should be made based on information about the current situation and the collected information about the environment. The capability to perform a selection, i.e. planning a purposeful behavior in a partially defined situation is a distinctive feature of an intelligent robot making it stand out of other similar systems. That’s why a system ensuring solution of the actions planning task is one of the most necessary systems for UAV control.
The main tasks to be solved for effective and safe UAV operation are:
- Path planning task;
- Obstacle avoidance task.
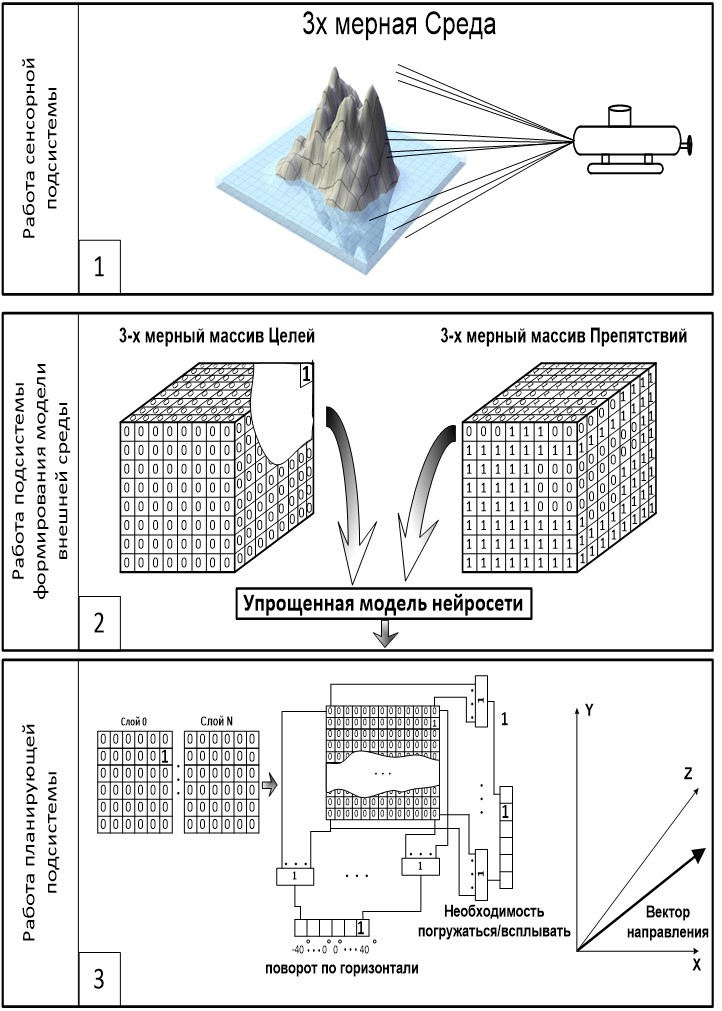
Neural networking planner
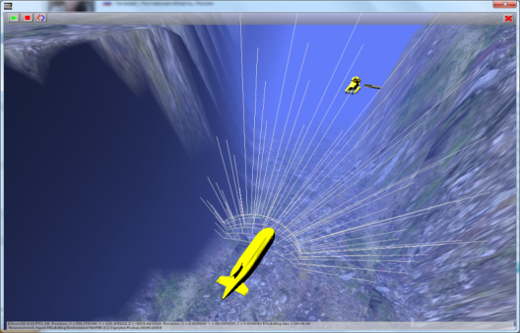
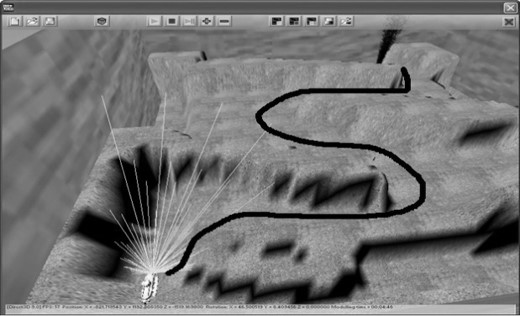
Modeling results for the planner in a virtual environment
External disturbances observer
The estimation algorithm is designed for perfecting the mathematical model of the underwater vehicle and accounting for the disturbances. In particular, mathematical models of the deformations based on the physics of the phenomena require measuring such variables as amount of deformations, deforming torques and forces. Besides, it is necessary to identify a number of UAV parameters. Analogous tasks emerge in estimation of other disturbances such as added forces and torques. So it is necessary to use such estimation algorithms that use the minimal amounts of information.
The following criteria are accounted selecting the estimation algorithm:
- estimation quality;
- algorithm’s generality;
- class of observed values;
- amount of required a-priory information;

Observer structure
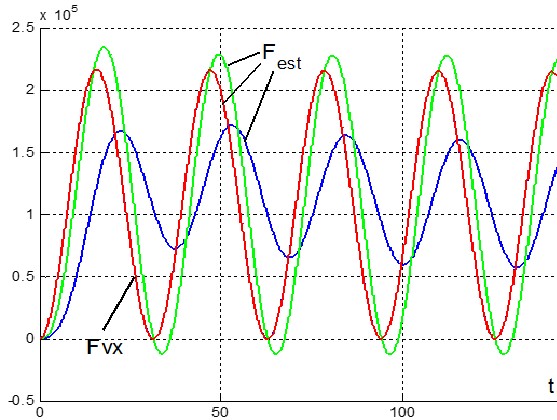

Results of researching the external disturbances observer
Software-hardwar
Before proceeding to selection of the separate elements of the UAV control system it is necessary to define the operation criteria for the whole system. Based on these criteria the requirements are formed for the onboard equipment to be selected.
The main task of the control system is performing UAV automatic control, ensuring sailing safety and ensuring motion avoiding collisions with other marine objects. We can highlight the following criteria common for all the control system units:
- reliability of continuous operation in the preset working conditions;
- accuracy of the mission completion;
- minimal mass and size.
Based on these criteria the requirements to the hardware implementation are formed for the UAV control system:
- replaceability allowing for a quick replacement of a failed unit with a new one;
- using the most standardized elements in development of the control system’s units;
- flexibility assuming presence of redundant resources (computational capacity, input/output channels, extended capabilities of the software interface);
- compact location of various electronic units inside the UAV control system block
Software of the onboard computer is developed using a sophisticated operation system, has a modular hierarchical structure. This allows for creation of various scenarios of its usage, for convenient analysis of the system data and fast modification of the system using modern development tools.




Training system for practicing the control technologies
The software modeling tools provide a capability for performing imitation modeling of UAV and control system based on the developed mathematical models of the UAV, algorithms of control planning and estimation of disturbances. They should describe both UAV with its control system and the environment, non-stationary internal and external parameters, arbitrary disturbances and interference in the measuring channels of the system’s state variables and control channels.
Using the software modeling tools in the iterational process of the control system design has the following purposes:
- research of the UAV mathematical model features;
- verification of the UAV control system – checking if its chracteristics satisfy the requirements, estimation of the system’s performance criteria;
- elaboration of the used mathematical models and control algorithms;
- graphical representation of the obtained results.
In building the software modeling suit the initial data is:
- mathematical model;
- the law generating control actions;
- motion planner algorithm;
- algorithms for estimation of parameters and disturbances;
- data about the errors of the sensors of position, speed, acceleration etc., models of noises in measuring and control channels;
- environment model.
The modeling software suit implements the following functions:
- forming a test mission;
- software implementation of path-planning algorithms for UAV;
- tuning the basic control algorithm for operation in the set mode;
- calculation of control actions based on the set control law;
- passing the calculated control actions into the UAV model and integration of the mathematical model;
- introduction of disturbances, environment model, errors;
- software implementation of algorithms for estimation of disturbances;
- saving history of the model’s state variables;
- drawing the graphs of UAV state variables, generated control actions, and other variables;
- presentation of the 3D motion models;
- estimation of the numerical modeling results: computational complexity of the algorithms implemented in the control system, energy parameters that the designe UAV should have etc.
The final goal of the software system for UAV motion modeling is taking the decision about relevancy and adequacy of the used algorithms and structures including the structure of the control system, controller structure, positioning in the set region and following the preset path, motion planning algorithms, obstacle avoidance, algorithms of automated (remote) control, algorithms of estimation of external and internal structural and parametric disturbances. The solution should be based on analysis of the obtained modeling results. Such results are root-mean square error of following the set path and effectiveness of the UAV control that is determined by a group of set criteria, estimation of energy parameters etc.



Performed projects
 Development of intelligent motion control system for unmanned underwater vehicles
Development of intelligent motion control system for unmanned underwater vehicles
Development of control systems for typical platforms.
Development of a technical project for a series of perspective UAV platforms.
![]()
Development of control system for a robot-glider

Modeling system for testing the UAV control algorithms
Intellectual property








Bibliography
- Gurenko B.V. Modern underwater robotics // Proc. of the All-Russian scientific conference “Robotics, mechatronics and intelligent systems”. Taganrog TSURE. 2005.- pp. 49-53.
- Pshikhopov V.Kh., Sirotenko M.U., Structural organization of automatic control systems for underwater vehicles // Information – measuring and control systems, Moscow, Radiotekhnika, 2006.-No1-3- Vol. 4 — pp. 73-78.
- Gureko B.V. Software suit for modeling the motion of autonomous mobile robots // Collection of works of all-Russian contest of студентов высших учебных заведений «Эврика-2008». Новочеркасск: Лик.- 2008. — С 384-386.
- Gureko B.V. Building and research of a mathematical model for underwater vehicle//Special edition of «Issues of military technology. Series 9 », 2010 — pp. 35-38.*
- Pshikhopov V.Kh., Sukonki S.Ya., Naguchev D.Sh., Strakovich V.V., Medvedev M.U., Gurenko B.V. , Kostukov V.A. Autonomous underwater vehicle “SKATE” «СКАТ» for searching silted objects// Izvestiya SFEDU. Special edition «Perspective systems and control problems». – Taganrog: TTI SFEDU.-2010.-No.
(116) – pp.153-163.* - Gurenko V.B., Synthesis of autopilots for autonomous underwater vehicles// Proc. of the international conference “Automation of control and intelligent systems and environments. — Nalchik : KBSC, 2010.-pp 48-52.
- V.Kh. Pshikhopov, M.U. Medvedev, R.V. Fedorenko, B.V.Gurenko et al Control of aeronautic systems: theory and design technologies, Moscow, FIZMATLIT, 2010. – 394 p. (monograph)
- Gurenko B.V., Structural synthesis of autopilots for UAVs//Izvestia Kabardino-Balkar
skogo Nauchnogo Tsentra RAS, No. 1, 2011 . - Gurenko B.V., Fedorenko R.V. Modeling system for aeronautic and marine vehicles// Izvestiya SFEDU. Technical Sciences. Special edition «Perspective Systems and Control Problems». – Taganrog: TTI SFEDU.- 2011.-No.3(116) , pp.180-186
- Gurenko B.V., Structural organization of automatic control systems for underwater glider// Izvestiya UFO. Technical sciences. Special edition “Perspective systems and control problem”. – Taganrog: TTI SFEDU.- 2011, No.3(116), pp. 199-205.
- Pshikopov V.Kh., M.U.Medvedev, B.V.Gurenko, A.A.Mazalov, Adaptive control for objects of a single class ensuring maximal stability// Izvesitya SFEDU. Technical sciences. “Perspective systems and control problem”, Taganrog, TTI SFEDU, 2012, No.3(116) , pp.180-186
- Pshikhopov, V.Kh., Medvedev, M.Yu., Gaiduk, A.R., Gurenko, B.V., Control system design for autonomous underwater vehicle, 2013, Proceedings — 2013 IEEE Latin American Robotics Symposium, LARS 2013, pp. 77-82, doi:10.1109/LARS
.2013.61. - V.Kh. Pshikhopov, M. Y. Medvedev, and B. V. Gurenko, “Homing and Docking Autopilot Design for Autonomous Underwater Vehicle”, Applied Mechanics and Materials. Vols. 490-491, pp. 700-707, 2014, doi:10.4028/www.
scientific.net/A MM.490-491.700. - Pshikhopov, V.K., Fedotov, A.A., Medvedev, M.Y., Medvedeva, T.N. & Gurenko, B.V. 2014, «Position-trajec
tory system of direct adaptive control marine autonomous vehicles», 2014 the 4th International Workshop on Computer Science and Engineering — Summer, WCSE 2014. - Pshikhopov, V., Chernukhin, Y., Fedotov, A., Guzik, V., Medvedev, M., Gurenko, B., Piavchenko, A., Saprikin, R., Pereversev, V. & Krukhmalev, V. 2014, «Development of intelligent control system for autonomous underwater vehicle», 2014 the 4th International Workshop on Computer Science and Engineering-Wint
er, WCSE 2014. - Pshikhopov V.Kh., Medvedev M.U., Fedornko R.V., Gurenko B.V., Chufistov , Shevchenko V.A., Algorithms of multiply connected position-path control for vehicles// Inzhenerny vestnik dona No.4, 2014, url:ivdon.ru/ru/
magazine/archive /N4y2014/2579 (in Russian) - Pshikhopov V.Kh., Medvedev M.U., Kostukov V.A., Gaiduk A.R., Fedorenko R.V., Gurenko B.V., Krukhmalev V.A., Medvedeva T.N., Design of robots and robotic systems: Study guide – Rostov on Don: SFEDU publishing house, 2014, 195 p.
- Pshikhopov V.Kh., Fedotov A.A., Medvedev M.U., Medvedeva T.N., Gurenko B.V., System of position-path direct adaptive control of marine vehicles// Inzhenerny vestnik dona, No.3, 2014, url:ivdon.ru/ru/
magazine/archive /n3y2014/2496 (in Russian). - Gurenko B.V. Building and research // Inzhenerny vestnik dona No.4, 2014, url:ivdon.ru/ru/
magazine/archive /N4y2014/2626 (In Russian). - Pshikhopov V.Kh., Chernukhin U.V., Fedotov A.A., Guzik V.F., Medvedev M.U., Gurenko B.V., Pyavchenko A.O.,Saprykin R.V., Pereverzev V.A., Priemko A.A. Development of intelligent control system for UAV// Izvestiya SFEDU. Technical Sciences. Taganrog: TTI SFEDU – 2014. – No. 3(152) pp. 87 – 101.
- Pshikhopov V.Kh., Gurenko B.V.Medvedev M.U., Maevsky A.M., Golosov S.P., Estimation of additive disturbances of UAV by a robust observer with nonlinear feedbacks// Izvestiya SFEDU. Technical Sciences. Taganrog: TTI SFEDU – 2014. – No. 3(152). – pp. 128 – 137.
- Pshikhopov V.Kh., Fedotov A.A., Medvedev M.U., Medvedeva T.N., Gurenko B.V., Zadoroahny V.A. Position-path system of direct adaptive control for marine vehicles // Proc. of 9th all-Russian conference «Perspective systems and control problems». Taganrog. SFEDU Publishing House, 2014. pp. 356 – 263.
- Gurenko B.V., Fedorenko R.V., Beresnev M.A., Saprykin R.V., Pereverzev V.A., Development of a UAV simulator// Inzhenerny vestnik dona No.3, 2014, http://ivdon.ru/
ru/magazine/arch ive/n3y2014/2504 (in Russian) - Kopylov S.A., Fedorenko R.V., Gurenko B.V., Beresnev M.A., Software suit for detection and diagnostics of hardware failures in robotic marine vehicles // Inzhenerny vestnik dona, No.3, 2014, url:ivdon.ru/ru/
magazine/archive /n3y2014/2526, (in Russian) - Gurenko, «Mathematical Model of Autonomous Underwater Vehicle,» Proc. of the Second Intl. Conf. on Advances In Mechanical and Robotics Engineering — AMRE 2014, pp. 84-87, 2014, doi:10.15224/ 978-1-63248-031-
6-156 - Gaiduk A.R., Plaksienko Е.A., Gurenko B.V., Synthesis of control systems with a preset structure // Nauchny Vestnik NSU. Novosibirsk, No.2(55) 2014, pp. 19-29.
- Gaiduk A.R., Pshikhopov V.Kh., Plaksienko Е.A., Gurenko B.V. Optimal control of nonlinear objects with application of quasilinear form //Science and education on the turn of the milleneums. Collection of scientific articls. Vol.1, Kislovodsk. 2014 p. 35-41
- Beresnev M.A., Beresnev A.L., Gurenko B.V. Peculiarities of propulsion selection for autonomous marine robotic systems// Proc. of conference «Modern view on the problems of technical sciences». — UFA, 2014, pp. 9-11.
- Gurenko B.V.Kopylov S.A., Beresnev M.A., Development of the vehicle failure detection system// International scientific institute Educatio. — 2014. — No.6. — pp. 49-50.
- Pshikhopov, Y. Chernukhin, V. Guzik, M. Medvedev, B. Gurenko, A. Piavchenko, R. Saprikin, V. Pereversev, V. Krukhmalev, «Implementation of Intelligent Control System for Autonomous Underwater Vehicle,» Applied Mechanics and Materials, Vols 701 — 702, pp. 704-710, 2015, doi: 10.4028/www.scie
ntific.net/AMM.7 01-702.704 - B.V. Gurenko, Development of algorithms for approaching and docking of UAV with underwater station// Izvestiya SFEDU. Technical Sciences. – 2015. – No. 2. pp. 162 – 175.
- Pshikhopov V.Kh., Medvedev M.U., Gurenko B.V., Algorithms of adaptive position-path control systems for vehicles. Control problems, Moscow: – 2015, Vol. 4, pp. 66 –76
- Gurenko, R.Fedorenko, M.Beresnev, R. Saprykin, «Development of Simulator for Intelligent Autonomous Underwater Vehicle», Applied Mechanics and Materials, Vols. 799-800, pp. 1001-1005, 2015, doi: http://dx.doi.or
g/10.4028/www.sc ientific.net/AMM .799-800.1001 - B.V. Gurenko, A.S. Nazarkin, Implementation and identification of parameters of a glider type UAV// Inzhenerny vestnik dona. – 2015. – No.4. – url: ivdon.ru/ru/maga
zine/archive/n4y 2015/3288 - Kostukov V.A., Kulchenko A.E., Gurenko B.V. Method of calculation of UAV hydrodynamic coefficients // Inzhenerny vestnik dona. – 2015. – No.3. – url: ivdon.ru/ru/maga
zine/archive/n3y 2015/3226 - Pshikhopov, M. Medvedev, B. Gurenko, «Development of Indirect Adaptive Control for Underwater Vehicles Using Nonlinear Estimator of Disturbances», Applied Mechanics and Materials, Vols. 799-800, pp. 1028-1034, 2015, doi:10.4028/www.
scientific.net/A MM.799-800.1028 - Gurenko, A. Beresnev, «Development of Algorithms for Approaching and Docking Underwater Vehicle with Underwater Station «, MATEC Web of Conferences, Vol. 26, 2015, doi: dx.doi.org/10.10
51/matecconf/201 5260400 - Gurenko B.V., R.Fedorenko, M.Beresnev, R. Saprykin, «Development of Simulator for Intelligent Autonomous Underwater Vehicle», Applied Mechanics and Materials, Vols. 799-800, pp. 1001-1005, 2015, doi: http://dx.doi.or
g/10.4028/www.sc ientific.net/AMM .799-800.1001 - Pshikhopov V.Kh., Gurenko B.V., Development of mathematical models of underwater vehicles – Study guide. Taganrog: SFEDU Publishing House, 2015. – 46 p.
- Kostukov V.A., Kulchenko A.E., Gurenko B.V., Model parameters research procedure for underwater vehicle// Proc. of XXXVI-XXXVII international conference No. 11-12 (35). — Novosibirsk, SIBAK, 2015. — pp.75-59
- Kostukov, A. Kulchenko, B. Gurenko, «A hydrodynamic calculation procedure for UV using CFD», in proceedings of International Conference on Structural, Mechanical and Materials Engineering (ICSMME 2015), 2015, doi:10.2991/icsm
me-15.2015.40 - B.V. Gurenko, I.O. Shapovalov, V.V. Soloviev, M.A. Beresnev., Building and researching the planning subsystem for the UAV control system // Inzhenerny vestnik dona. – 2015. – No.4. – url: ivdon.ru/ru/maga
zine/archive/n4y 2015/3383 - Pshikhopov, V.a , Medvedev, M.a , Gurenko, B.b , Beresnev, M.a Basic algorithms of adaptive position-path control systems for mobile units ICCAS 2015 — 2015 15th International Conference on Control, Automation and Systems, Proceedings23 December 2015, Article number 7364878, Pages 54-59 DOI: 10.1109/ICCAS.20
15.7364878 - Pshikhopov, M. Medvedev, V. Krukhmalev,V. Shevchenko Base Algorithms of the Direct Adaptive Position-Path Control for Mobile Objects Positioning. Applied Mechanics and Materials Vol. 763 (2015) pp 110-119 © (2015) Trans Tech Publications, Switzerland. doi:10.4028/www.
scientific.net/A MM.763.110 - Pshikhopov V.Kh., Gurenko B.V.Fedorenko R.V., Software of onboard adaptive control system for UAV (Software registry record on the 11th of January 2016 (Reg. No. 2016610059 of 11.01.2016)
- Vyacheslav Pshikhopov, Boris Gurenko, Maksim Beresnev, Anatoly Nazarkin IMPLEMENTATION OF UNDERWATER GLIDER AND IDENTIFICATION OF ITS PARAMETERS Jurnal Teknologi Vol 78, No 6-13 DOI: http://dx.doi.or
g/10.11113/jt.v7 8.9281







