Актуальность
Актуальность дирижаблей в целом связана с аэростатическим способом создания подъемной силы, а также с развитием технических возможностей производства дирижаблей на новом уровне. Об происходящем новом витке развития дирижаблестроения свидетельствуют и многочисленные сообщения о проектах и испытаниях дирижаблей различной конструкции.

Области применения дирижаблей
Актиуальность разработки систем автоматического управления дирижаблями:
- Исключаются человеческие ошибки
- Пилоту (оператору) трудно «ощущать» дирижабли с большими размерами и управлять ими
- Система управления может использоваться как вспомогательная система для пилота (как «круиз-контроль»)
- Операции взлета и посадки являются трудными для пилота в условиях внешних ветровых возмущений
- Использование системы управления облегчит управление полетом в условиях сильных ветровых нагрузок
- Улучшенная безопасность благодаря автоматическим реакциям системы управления в аварийных условиях (когда действия пилота ограничены или невозможны)
- Возможность использования, когда пилотирование невозможно: длительные полеты, полеты при высокой радиации, химической или биологической опасности, и т.д.
Проектирование систем автоматического управления дирижаблями
С точки зрения реализации автоматического управления дирижабли являются наиболее привлекательным типом летательных аппаратов, т.к. даже при кратковременном отказе системы управления они остаются в воздухе за счет аэростатической подъемной силы. В другой стороны, как объекты управления дирижабли имеют ряд особенностей, которые нужно учитывать при разработке законов управления:
- дирижабль имеет большую площадь поверхности;
- собственная скорость дирижабля сопоставима со скоростью воздушной среды;
- аэродинамические исследования требуется проводить для широкого диапазона изменения параметров полета дирижабля (воздушная скорость, угол атаки, угол скольжения, угловые частоты, высоты полета).
При разработке систем автоматического управления дирижаблями мы придерживаемся следующей последовательности проектирования:
- Математическое моделирование;
- Разработка законов и алгоритмов управления;
- Программно-аппаратная реализация системы автоматического управления.

Этапы проектирования систем управления дирижаблями
Математическое моделирование дирижабля
Математическая модель дирижабля строится на базе модели кинематики и динамики твердого тела, моделей динамики исполнительных механизмов, модели воздушно-газовой системы.
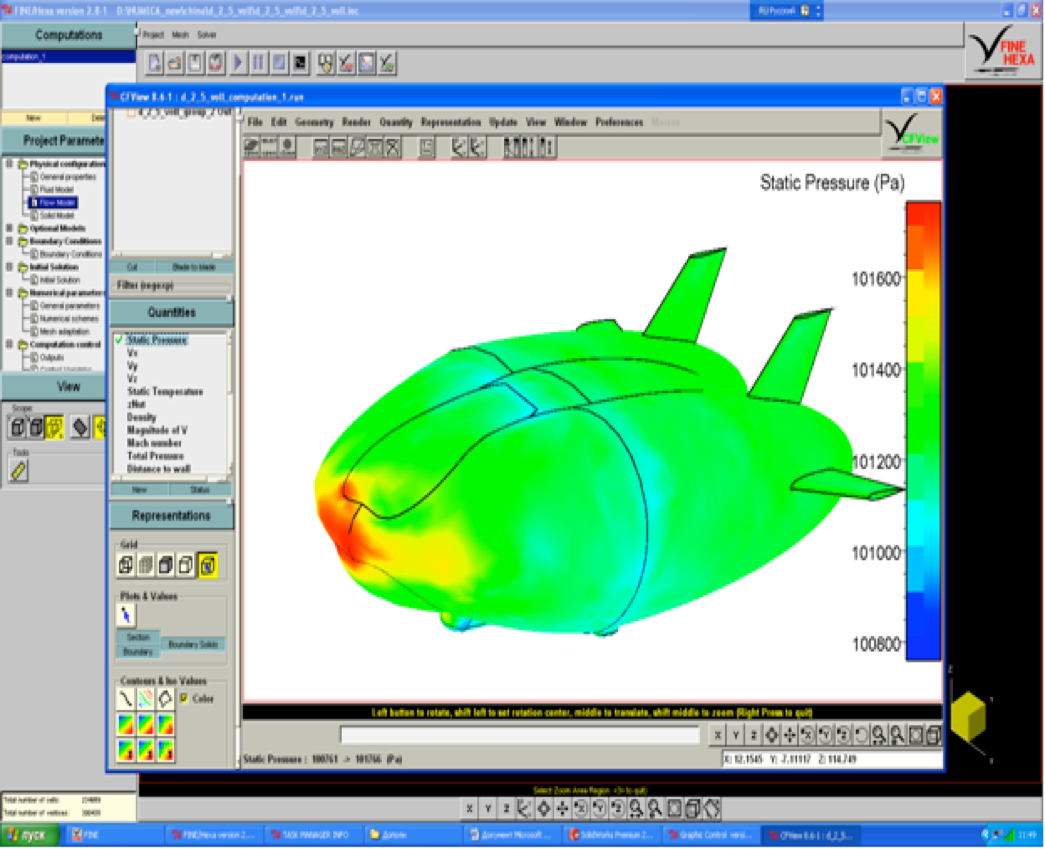
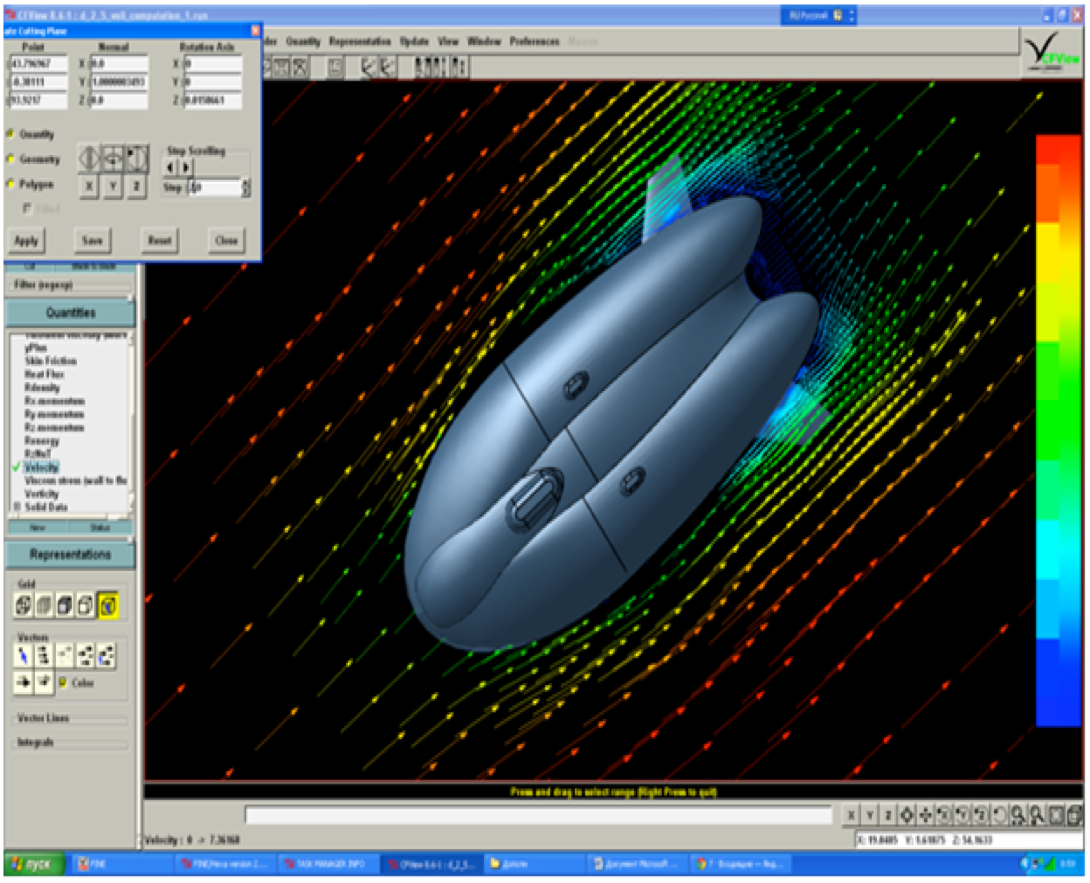
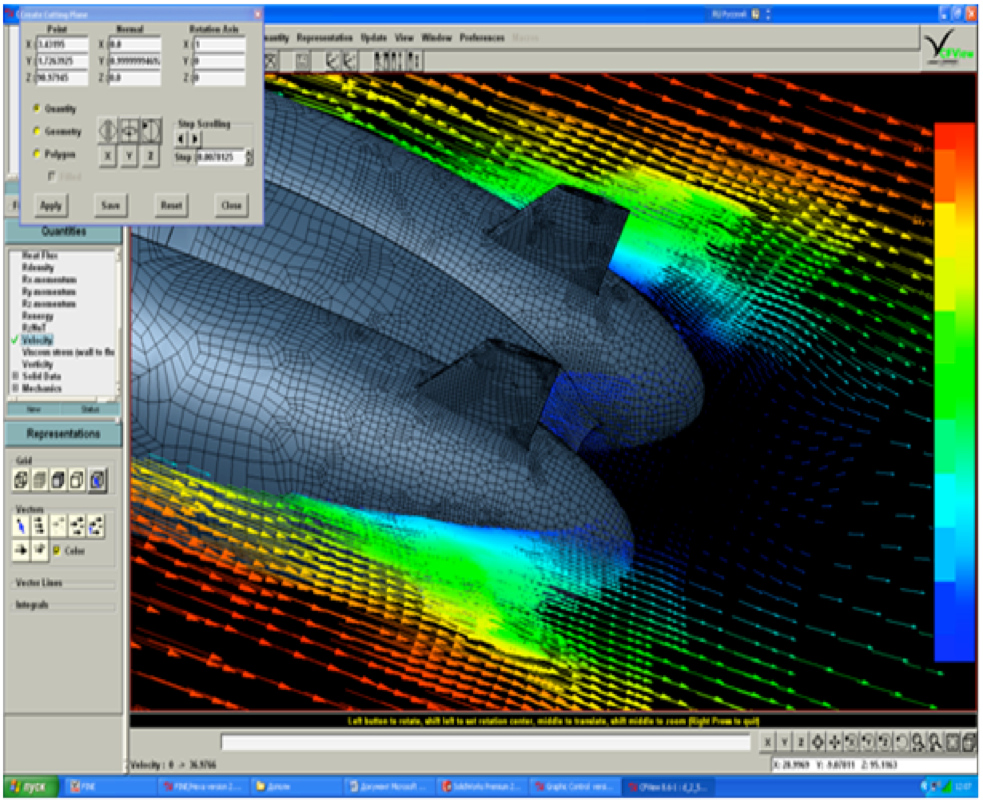
Для задания параметров математической модели дирижабля выполняются расчеты аэродинамических коэффициентов, массо-инерционных параметров и других параметров.

Структура математической модели дирижабля
Основные результаты математического моделирования:
- Результаты оценки управляемости в различных режимах на основе уравнений кинематики и динамики движения дирижабля;
- Зависимость аэродинамических коэффициентов от скорости ветра, углов атаки и скольжения, угловой скорости и высоты полета дирижабля;
- Зависимость аэродинамических сил и моментов, создаваемых оперением дирижабля от скорости ветра, углов атаки и скольжения, угловой скорости и высоты полета дирижабля;
- Зависимость тяговых характеристик винтов движителей от скорости их вращения, скорости и высоты полета дирижабля
- Модель баллонетов, отражающая его влияние на массу дирижабля и величину и точки приложения сил тяжести и Архимеда.
- Потребные тяги и мощности движителей, необходимые для реализации заданных траекторий при различных скоростях, углах атаки и скольжения, высотах, размещении движителей.

Законы и алгоритмы управления
Оригинальный запатентованный алгоритм управления рассчитывает необходимые для движения по заданному полетному заданию силы и моменты и уставки исполнительных механизмов.

Задачи автоматического управления дирижаблями

Функциональная схема систем управления дирижаблями
Для учета деформаций, неточности определения аэродинамики и присоединенных масс, неучтенных факторов (обледенение, неравномерный нагрев) используются алгоритмы робастного оценивания внешних, параметрических и структурных возмущений, действующих в системе управления дирижабля.
Программно-аппаратная реализация системы управления
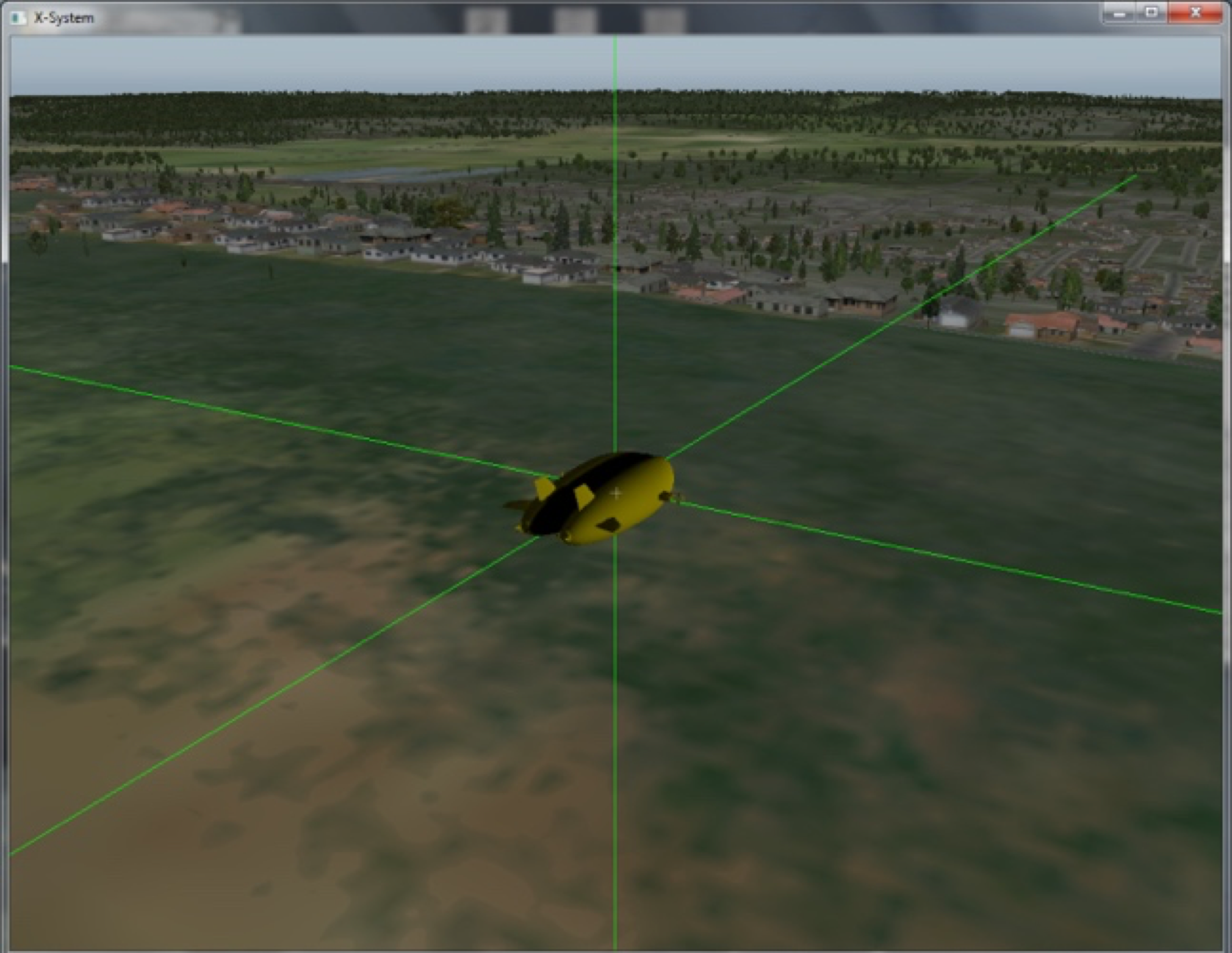
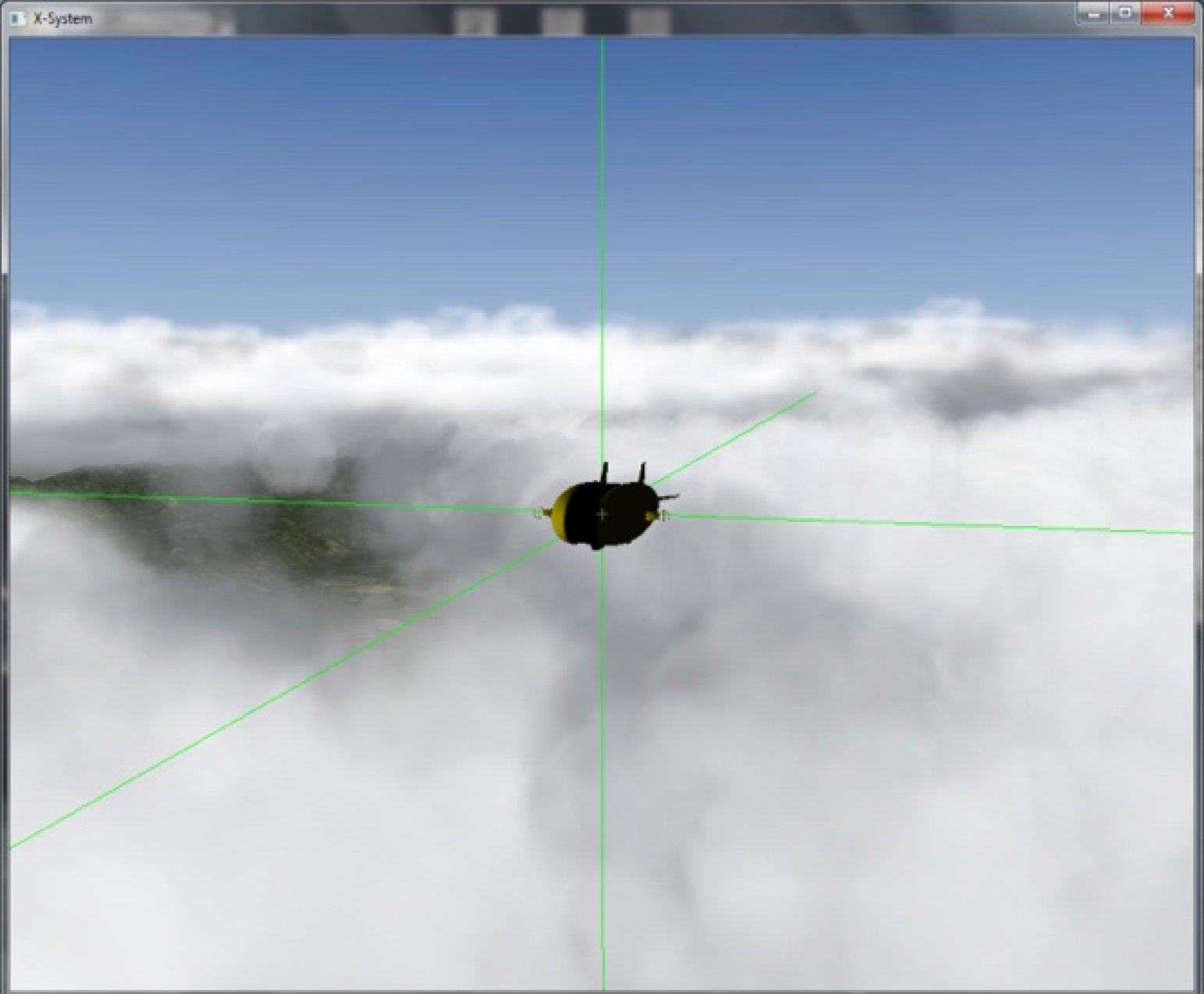
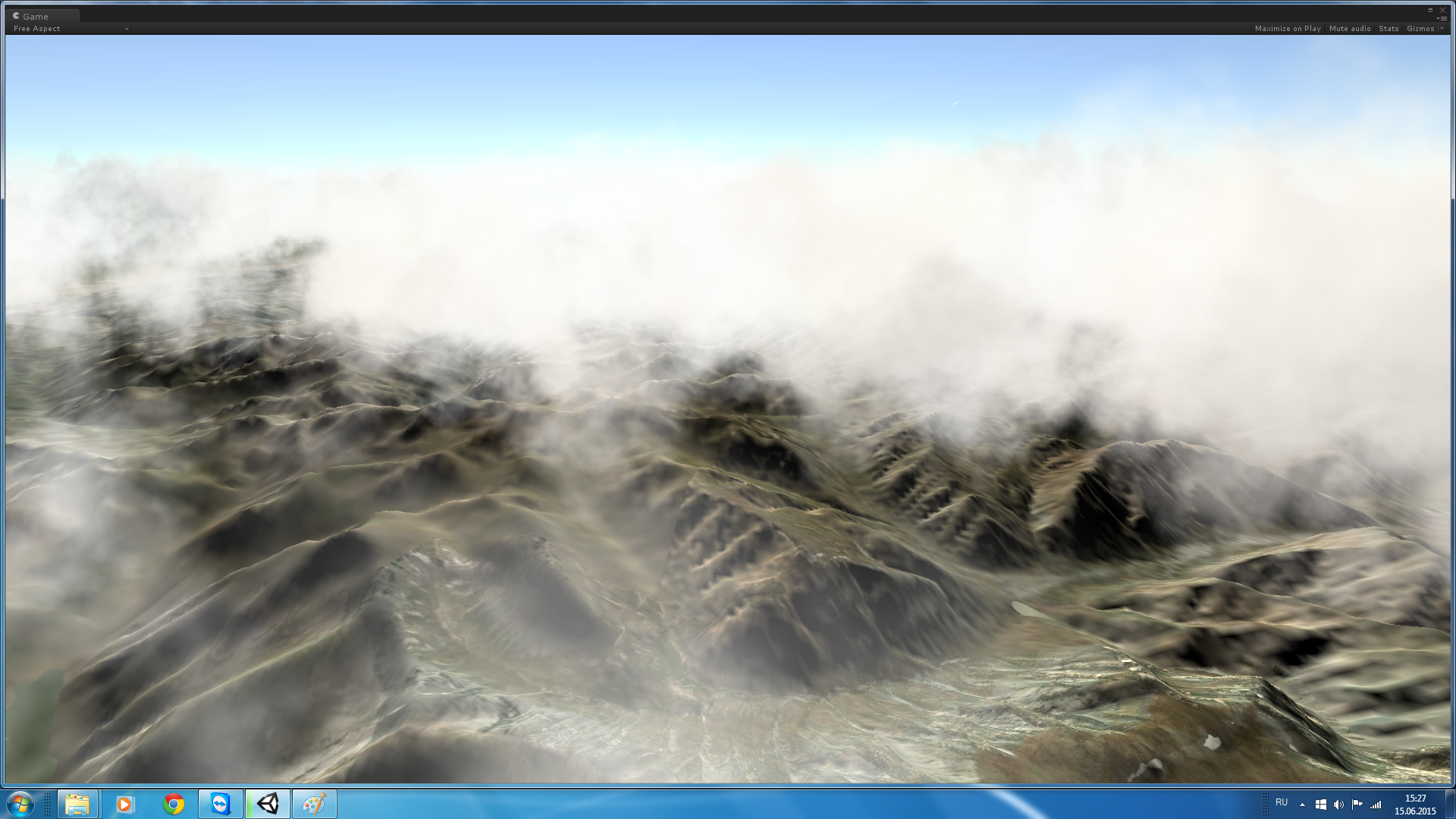
Для отладки, стендовых испытаний системы автоматического управления, оценки технических характеристик выбранной конструкции дирижабля, (таких как длительность автономной работы, потребляемая энергия, точность удержания заданного положения и движения вдоль заданной траектории), обучения оператора и демонстрации возможностей системы на начальном этапе реализации системы управления разрабатывается стенд имитационного моделирования полета дирижабля.

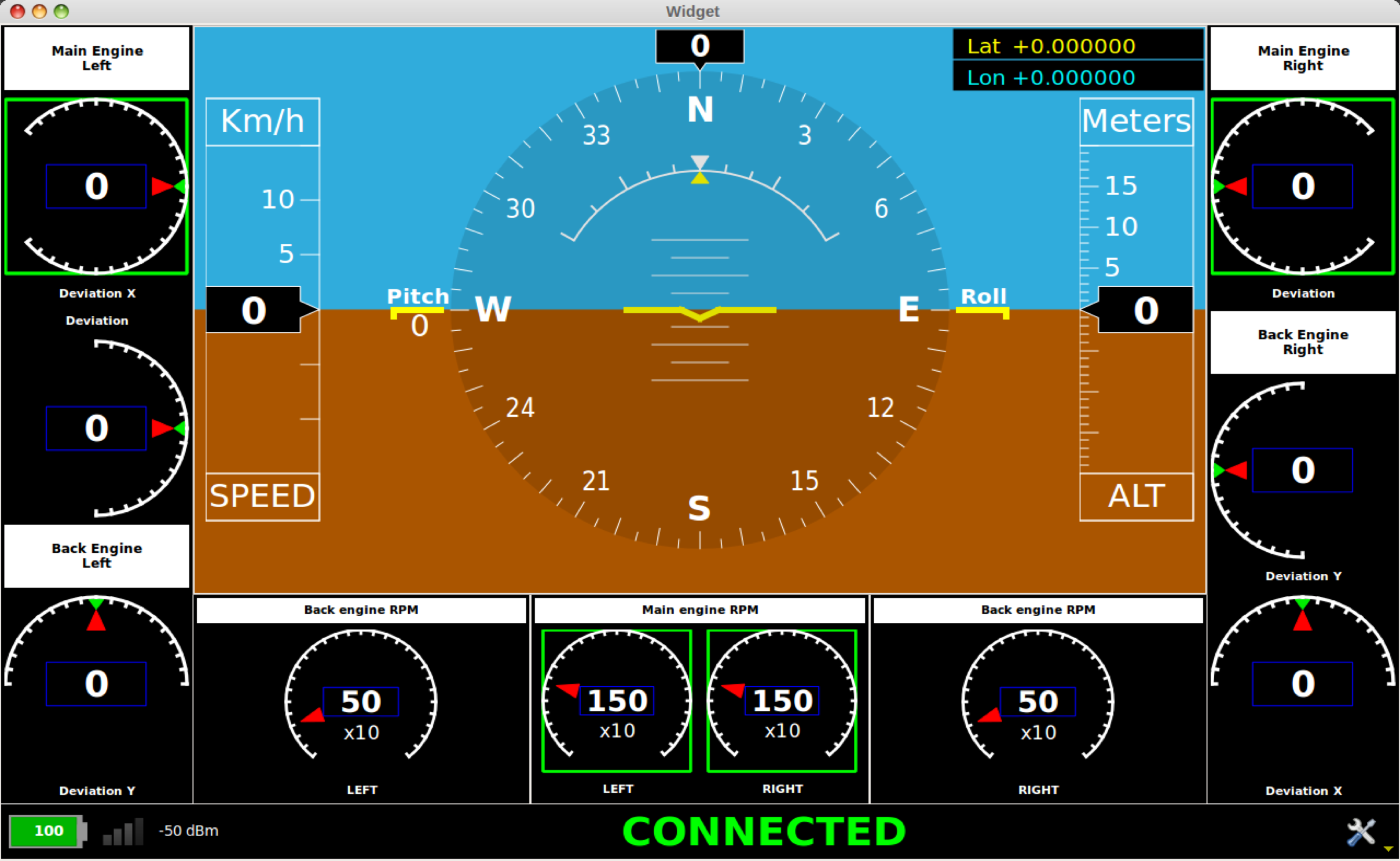
Система управления и навигации имеет модульную архитектуру, что облегчает ее наладку, эксплуатацию и ремонт, а также позволяет модифицировать систему под требования Заказчика.

Структура систем управления дирижаблями
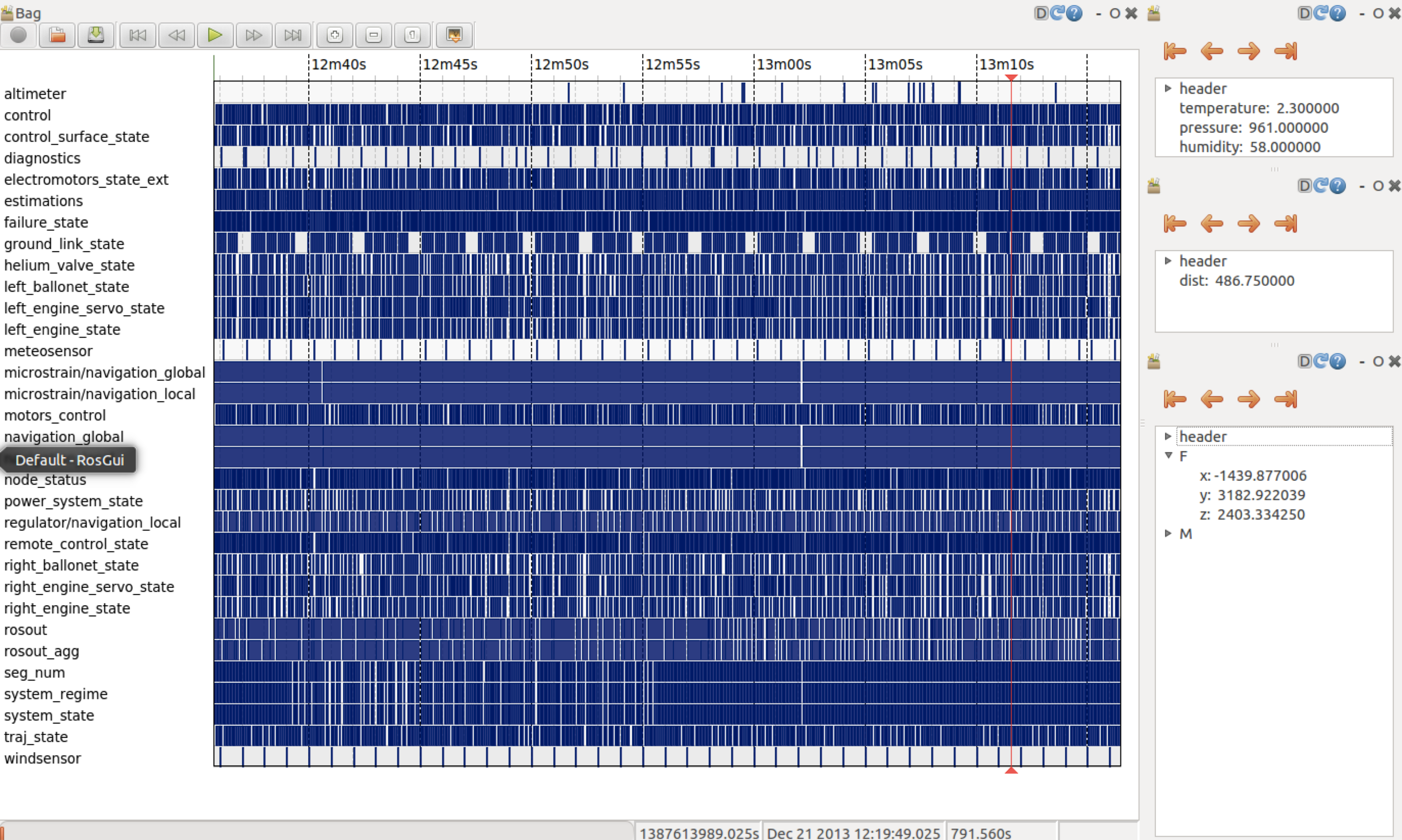
Программное обеспечение бортового компьютера разработано на базе развитой операционной системы, имеет модульную иерархическую структуру. Это позволяет создавать различные сценарии его использования, удобно анализировать имеющиеся в системе данные и оперативно производить модификацию системы с использованием современных средств разработки. Программное обеспечение имеет в своем составе средства записи всех полетных данных и их воспроизведения и конвертации для последующего анализа.








Выполненные проекты:
 |
Разработка, изготовление и поставка системы управления, навигации и телекоммуникации для прототипа беспилотного высотного дирижабля (системы управления платформой летательного аппарата ближнего космоса) по заказу Хунаньского космического агентства Китая |
 |
Участие в проекте МААТ– Многоуровневая транспортная система на базе стратосферных дирижаблейпо гранту Еврокомиссии |
 |
НИОКР по заказу Министерства обороны РФ
|
 |
Инициативный проекта по разработке роботизированного мини-дирижабля «Стерх» |
| Ряд студенческих проектов |
Дополнительные материалы
Скачать техническое предложение
Интеллектуальная собственность
- Устройство управления дирижаблем. Патент № 137812 на полезную модель от 05.02.2014
- Программа расчета и исследования вероятностной модели среды для системы планирования движения автономного стратосферного дирижабля: свидетельство о государственной регистрации программы для ЭВМ № 2014613033
Публикации
- Пшихопов, В.Х. Управление воздухоплавательными комплексами: теория и технологии проектирования [Текст] / В.Х. Пшихопов, М.Ю. Медведев, Р.В. Федоренко и др.– М.: ФИЗМАТЛИТ, 2010. – 394 с.
- Федоренко, Р.В. Алгоритмы автопилота посадки роботизированного дирижабля [Электронный ресурс] // Р.В. Федоренко.– Электронный научно-инновационный журнал Инженерный вестник Дона.– 2011.– №1.–http://ivdon.ru/uploaddir/articles.371.big_image.doc.
- Федоренко, Р.В. Структурно-алгоритмическая и аппаратная организация автопилота посадки робота-дирижабля с применением визуальной навигации [Электронный ресурс] // Р.В. Федоренко.– «Наука и образование: электронное научно-техническое издание.– 2011.– №9.– http://technomag.edu.ru/doc/214119.html.
- Федоренко, Р.В. Комплекс моделирования движений подвижных объектов на базе воздухоплавательных и подводных аппаратов [Текст] // Р.В. Федоренко, Б.В. Гуренко.– Известия ЮФУ. Технические науки № 3 (116).– Таганрог: Изд-во ТТИ ЮФУ, 2011.– с. 180-187.
- Pshikhopov, V., Medvedev, M., Kostjukov, V., Fedorenko, R. et al., «Airship Autopilot Design,» SAE Technical Paper 2011-01-2736, 2011, doi:10.4271/2011-01-2736.
- Нейдорф Р.А., Новиков С.П., Федоренко Р.В. Задачи и методы управления многобаллонетными системами дирижаблей // Материалы Восьмой Всероссийской научно-практической конференции «Перспективные системы и задачи управления». – Таганрог: Изд-во ТТИ ЮФУ, 2013. – с. 247 – 256
- Neydorf, R., Novikov, S., and Fedorenko, R., «Continuous-Positional Automatic Ballonet Control System for Airship,» SAE Int. J. Aerosp. 6(2):598-606, 2013, doi:10.4271/2013-01-2236.
- В.Х. Пшихопов, М.Ю. Медведев, Р.В. Федоренко и др. Система позиционно-траекторного управления роботизированной воздухоплавательной платформой [Текст]. Часть 1. Математическая модель // Мехатроника, автоматизация, управление. — 2013. — № 6 (147). — С. 14-21
- В.Х. Пшихопов, М.Ю. Медведев, Р.В. Федоренко и др. Система позиционно-траекторного управления роботизированной воздухоплавательной платформой [Текст]. Часть 2. Алгоритмы управления // Мехатроника, автоматизация, управление. — 2013. — № 7 (148). — С. 13-20
- K. Pshikhopov, M. Yu. Medvedev, R.V. Fedorenko et al., «Adaptive Control System Design for Robotic Aircrafts,» Robotics Symposium and Competition (LARS/LARC), 2013 Latin American, Arequipa, 2013, pp. 67-70.
- K. Pshikhopov, M. Yu. Medvedev, R.V. Fedorenko et al., «Mathematical model of robot on base of airship,» 52nd IEEE Conference on Decision and Control, Firenze, 2013, pp. 959-964.
- Kh. Pshikhopov, M.Yu. Medvedev, A.R. Gaiduk, R.V. Fedorenko, V.A. Krukhmalev, B.V. Gurenko, Position-Trajectory Control System for Unmanned Robotic Airship, IFAC Proceedings Volumes, Volume 47, Issue 3, 2014, Pages 8953-8958, ISSN 1474-6670
- Пшихопов В.Х., Медведев М.Ю., Федоренко Р.В., Гуренко Б.В., Чуфистов В.М., Шевченко В.А. Алгоритмы многосвязного позиционно-траекторного управления подвижными объектами // Инженерный вестник дона #4, 2014, url:ivdon.ru/ru/magazine/archive/N4y2014/2579 (доступ свободный) – Загл. с экрана. – Яз. рус.
- Pshikhopov, V., Medvedev, M., Krukhmalev, V., Fedorenko, R. et al., «Method of Docking for Stratospheric Airships of Multibody Transportation System,» SAE Technical Paper 2014-01-2162, 2014, doi:10.4271/2014-01-2162.
- Roman Fedorenko, Victor Krukhmalev Indoor Autonomous Airship Control and Navigation System // MATEC Web of Conferences 42 01006 (2016) DOI: 10.1051/matecconf/20164201006
- Нейдорф Р.А., Болдырева А.А. Объемный принцип управления подъемом / спуском челноков системы MAAT. – Известия ЮФУ. Технические науки. – 2013. — No7(144). Тематический выпуск Интеллектуальные САПР – С.184 — 190.
- Voloshin V., Chen Y., Neydorf R., Boldyreva A. Aerodynamic characteristic study and possible improvements of MAAT feeder airships. – SAE 2013. AeroTech Congress & Exhibition [Электронный ресурс]. — Montreal (Quebec, Canada), 2013. — Режим доступа: http://papers.sae.org/2013-01-2112, doi: 10.4271/2013-01-2112.
- Болдырева А.А. Эффективность использования массы в летательных аппаратах аэростатного типа. — Перспективные системы и задачи управления: сб. материалов 7-ой Всерос. науч.-практ. конф. – Таганрог: Изд-во ТТИ ЮФУ, 2012. – С.112 — 117.
- Болдырева А.А. Суточные температурные колебания высоты полета стратосферной платформы и методы их компенсации. – Системный анализ, управление и обработка информации: сб. тр. III Междунар. науч. семинара, п. Дивноморское, 27 сент. — 2 окт. [Электронный ресурс] / ДГТУ. – Ростов н/Д, 2012. — 1 электрон. опт. диск (CD-ROM). – С. 170 — 176.
- Нейдорф Р.А., Новиков С.П., Болдырева А.А. Баллонетная подсистема управления состоянием дирижабля и ее математическая модель. — Инновация, экология и ресурсосберегающие технологии (ИнЭРТ-2012): тр. X Междунар. науч.-техн. форума [Электронный ресурс] / ДГТУ. — Ростов н/Д, 2012. — 1 электрон. опт. диск (CD-ROM). — No гос. регистрации 0321203961. – С. 386 — 390.
- Нейдорф Р.А., Болдырева А.А. Энергетические проблемы управления всплыванием челнока системы MAAT. — Материалы восьмой научно-практической конференции «Перспективные системы и задачи управления» / ТТИ ЮФУ. — Таганрог, 2013.– С. 274 — 282.
- Нейдорф Р.А., Болдырева А.А. Влияние конструктивных особенностей челнока системы MAAT на задачи и возможности управления. — Материалы восьмой научно-практической конференции «Перспективные системы и задачи управления» / ТТИ ЮФУ. — Таганрог, 2013. — С. 272 — 273.













