Цель
Целью работы являлась разработка, изготовление и поставка системы управления, навигации и телекоммуникации для прототипа высотного беспилотного дирижабля, позволяющей осуществлять:
- автоматическую ориентацию в пространстве при выполнении полетного задания;
- автоматическое (по полетному заданию) управление траекторией полета;
- дистанционное управление полетом с использованием терминалов телекоммуникации;
- высокоскоростной информационный обмен данными между Дирижаблем и наземным пунктом управления.
Сроки выполнения
2011 — 2013
Заказчик

Хунаньский научно-исследовательский институт космического электромеханического оборудования и специальных материалов (Hunan Aerospase Electromechanical Equipment and Special Materials Research Institute), г. Чанша, Китай
Партнеры



- АО «Рособоронэкспорт»
- ООО «Специальный Технологический Центр», Санкт-Петербург
- Научно-исследовательский институт космического приборостроения, Москва
- MicroMax Systems, Москва
Результаты
Структура
Система управления, навигации и телекоммуникации состоит из наземной и бортовой частей, связанных между собой линией радиосвязи.

Структура системы управления, навигации и телекоммуникации
Система управления, навигации и телекоммуникации имеет модульную архитектуру, что облегчает ее наладку, эксплуатацию и ремонт, а также позволяет модифицировать систему под требования Заказчика.


Навигационная система
Навигационная система для дирижабля включает в свой состав:
- интегрированную навигационную систему;
- радиолокационный высотомер.
 Малогабаритная интегрированная навигационная система используя оригинальный алгоритм интегрирования данных GPS/ГЛОНАСС с измерениями инерциальных датчиков выдает в цифровой форме полный набор необходимых для управления дирижаблем данных:
Малогабаритная интегрированная навигационная система используя оригинальный алгоритм интегрирования данных GPS/ГЛОНАСС с измерениями инерциальных датчиков выдает в цифровой форме полный набор необходимых для управления дирижаблем данных:
- координаты местоположения и высота;
- углы ориентации: курс, крен, тангаж;
- скорость в земной СК, вертикальная скорость;
- ускорения, угловые скорости.
![]() Для улучшения точности измерения курса дирижабля, а также для резервирования интегрированной навигационной системы используется дополнительная навигационная система.
Для улучшения точности измерения курса дирижабля, а также для резервирования интегрированной навигационной системы используется дополнительная навигационная система.
 Для предупреждения столкновения с землей и измерения расстояния до поверхности в системе используется компактный радиолокационный высотомер. Он включает в себя блок приемопередатчика и отдельную антенну. Высотомер может работать в условиях тумана, пыли и над водой.
Для предупреждения столкновения с землей и измерения расстояния до поверхности в системе используется компактный радиолокационный высотомер. Он включает в себя блок приемопередатчика и отдельную антенну. Высотомер может работать в условиях тумана, пыли и над водой.
Датчики внешней среды
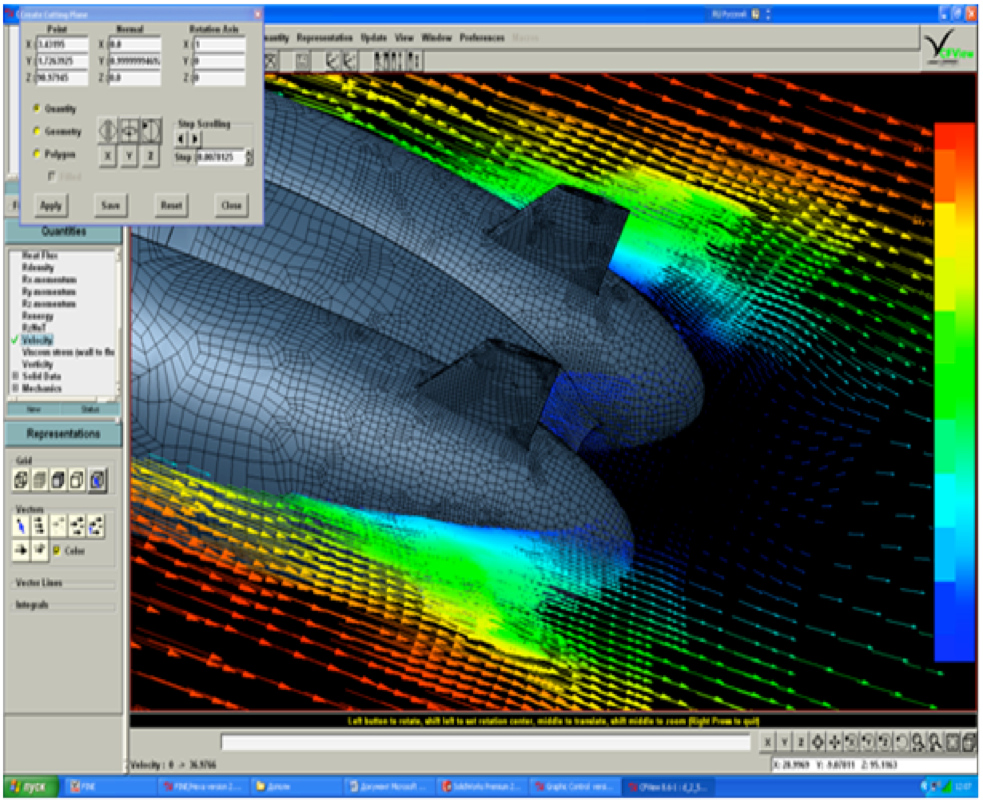
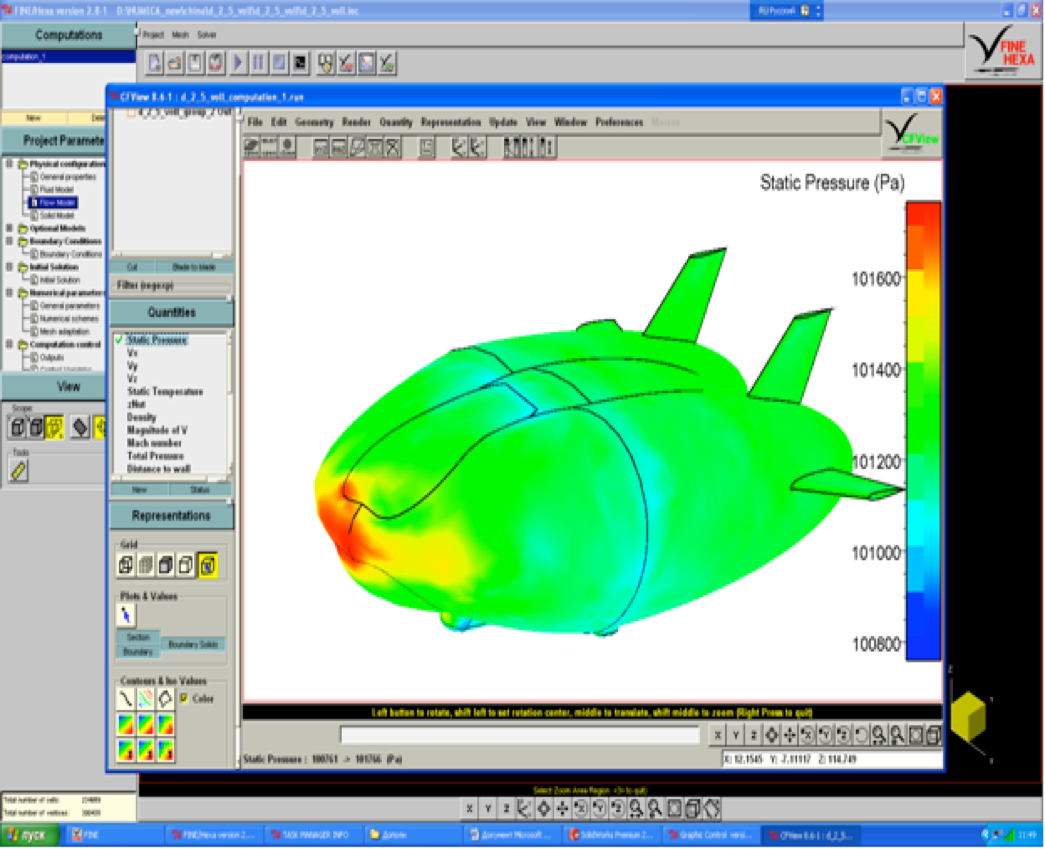
![]() Датчики внешней среды используются для оценки сил аэродинамики, действующих на дирижабль, а также для информирования оператора о параметрах среды.
Датчики внешней среды используются для оценки сил аэродинамики, действующих на дирижабль, а также для информирования оператора о параметрах среды.
В состав датчиков внешней среды входят:
- датчик скорости и направления ветра;
- метеодатчик, объединяющий в себе функции датчиков температуры, давления и влажности окружающей среды.
Датчик скорости и направления ветра измеряет время, необходимое для прохождения ультразвукового импульса из одного приемо-излучающего элемента к противоположному, а затем сравнивает его со временем, необходимым для передачи импульса в противоположном направлении. Измерения производятся между тремя парами преобразователей, что позволяет рассчитать три проекции воздушной скорости дирижабля и углы атаки и скольжения.
Метеодатчик совмещает измерение трех показателей: давления, температуры и влажности.
Бортовой компьютер

Для системы управления разработан высокопроизводительный компактный бортовой компьютер. Бортовой компьютер разработан для эксплуатации в экстремально тяжелых условиях окружающей среды. Вычислитель оснащен интерфейсами видеозахвата CVBS, шины CAN, расширенным набором последовательных портов RS232/422/485, портами цифрового ввода-вывода. Встроенный аппаратный обработчик видео поддерживает одновременное кодирование и оцифровку видео с 3 каналов. В корпусе компьютера установлен источник бесперебойного питания на суперконденсаторах, обеспечивающий до 2 минут резервного питания.

Бортовой компьютер дублируется в системе аналогичным компьютером для повышения надежности системы.

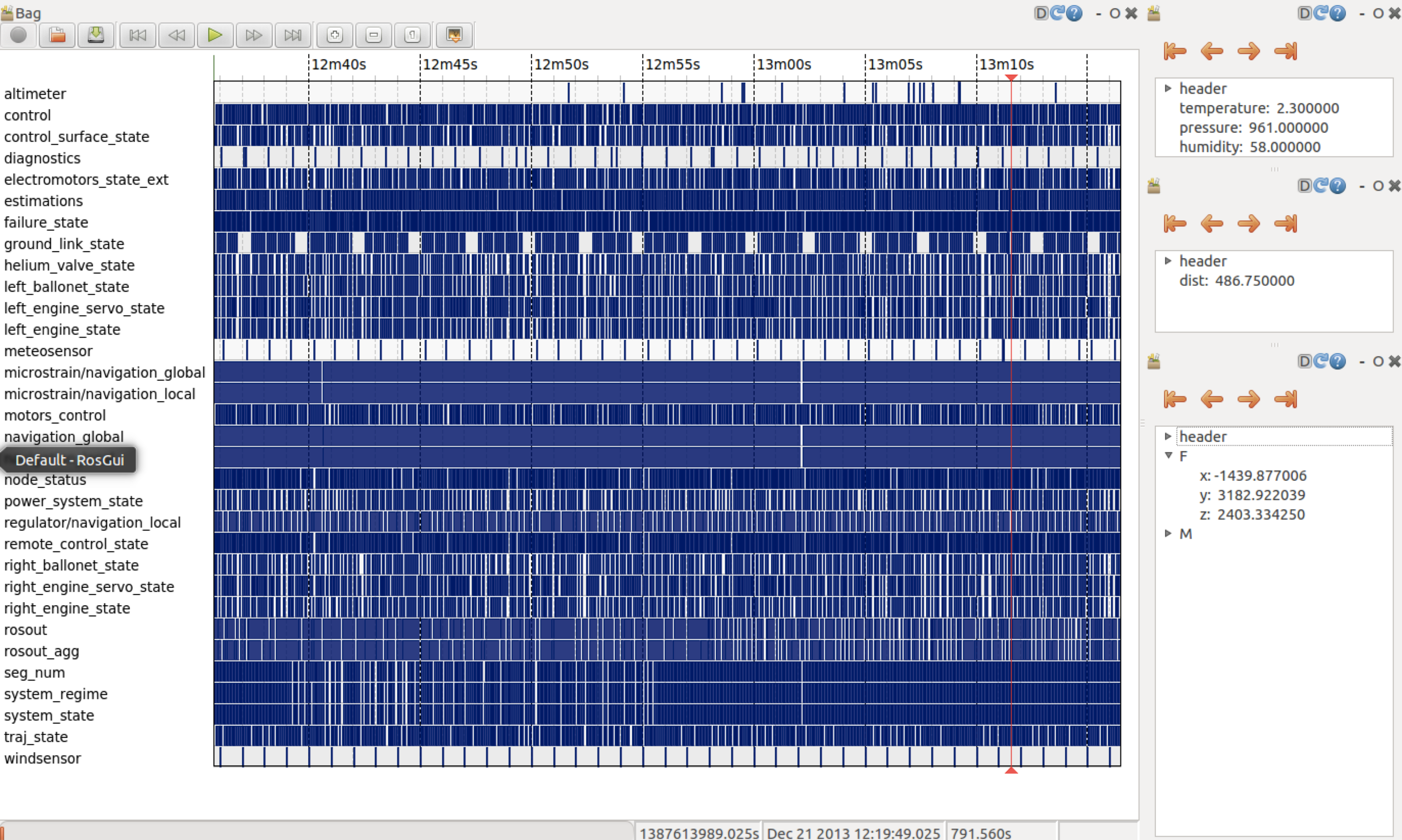
Программное обеспечение бортового компьютера разработано на базе развитой операционной системы, имеет модульную иерархическую структуру. Это позволяет создавать различные сценарии его использования, удобно анализировать имеющиеся в системе данные и оперативно производить модификацию системы с использованием современных средств разработки. Программное обеспечение имеет в своем составе средства записи всех полетных данных и их воспроизведения и конвертации для последующего анализа. Любые данные всегда доступны для просмотра и построения графиков.


Наземный пункт управления
Наземный пункт управления реализует функции, необходимые для взаимодействия оператора и бортовой системы управления дирижаблем.
В состав наземного пункта управления входят рабочее место оператора наземного пункта управления, устройство спутниковой навигации, звуковая система оповещения, джойстики и педали.


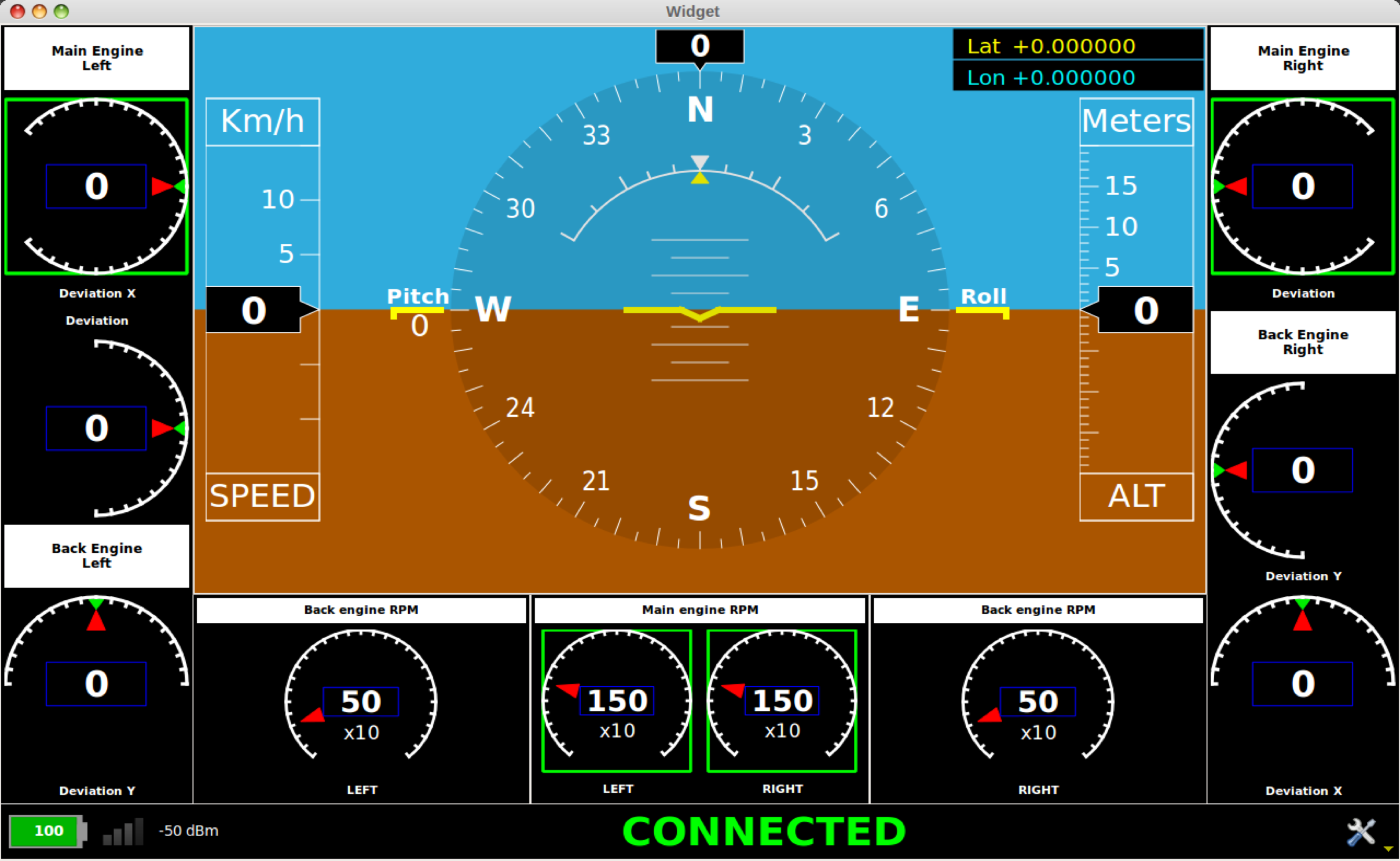
Функциональные возможности наземного пункта управления обеспечиваются специальным программным обеспечением с графическим интерфейсом пользователя. Главный интерфейс наземного пункта управления, представляет собой набор информационных виджетов (окон), отображение которых может динамически меняться и переключаться между необходимыми представлениями.
Основные данные отображаются в следующих виджетах:
- виджет состояния маршевых двигателей;
- виджет состояния электродвигателей;
- состояние баллонетов;
- мультифункциональный индикатор (тангаж, крен, скорость, высота, расстояние до НПУ и т.д) ;
- виджет состояния окружающей среды;
- карта.
Возможен просмотр переменных состояния дирижабля в табличном представлении и в виде графиков.
Ручной пульт управления
Ручной пульт управления предназначен для дистанционного управления дирижаблем в прямой видимости на расстоянии до 2 км.
В состав ручного пульта управления входят 4 двухстепенных джойстика, сенсорный дисплей, устройство связи.
На дисплее ручного пульта управления отображаются текущая навигационная информация и состояния исполнительных механизмов дирижабля.
Ручной пульт соединяется по каналу связи непосредственно с бортовой частью системы управления.



Система телекоммуникации
 В состав терминалов телекоммуникации входят:
В состав терминалов телекоммуникации входят:
- бортовой терминал;
- наземный терминал.
Терминалы телекоммуникации реализуют высокоскоростной и низкоскоростной каналы связи.
В антеннах высокоскоростного канала связи используется активная фазированная антенная решётка (АФАР). Антенны имеют 16 секторов и позволяют осуществлять сканирование по всем углам азимута.
Автоматическое управление движением
Полетное задание формируется оператором наземного пункта управления визуально на карте из сегментов – линий или дуг окружностей.
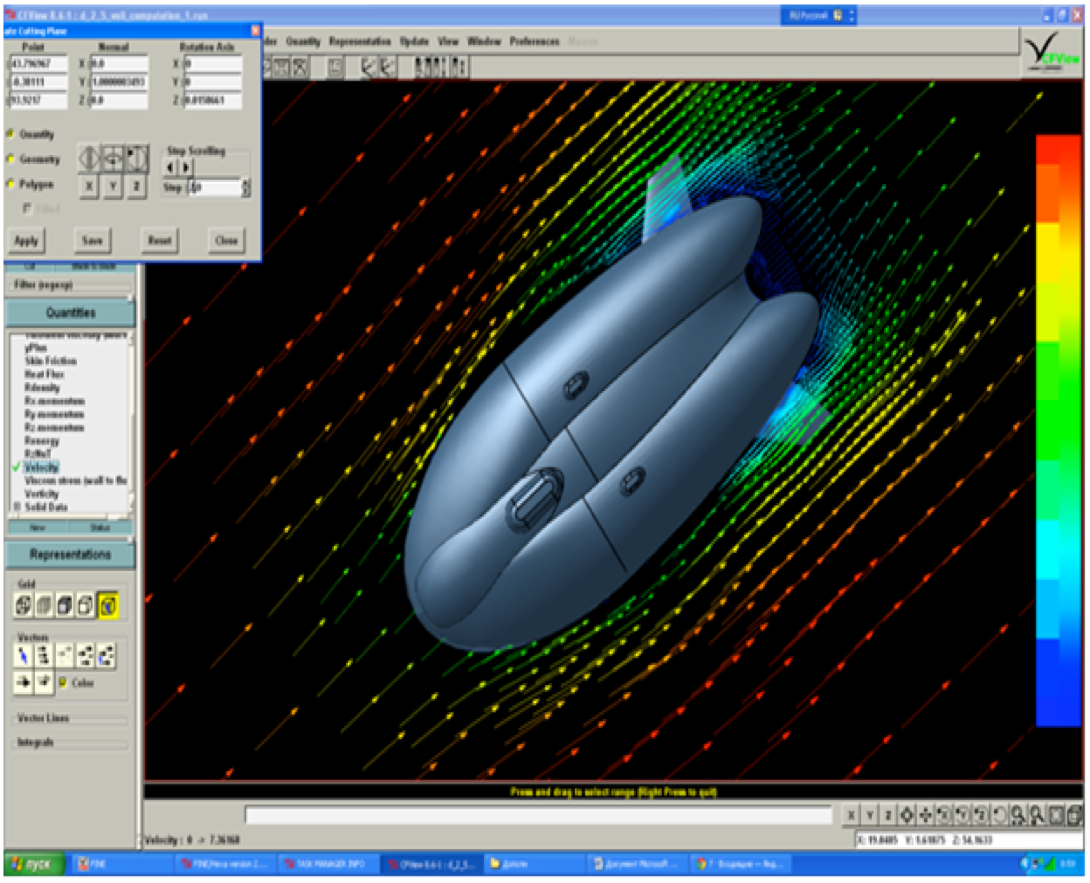
Оригинальный запатентованный алгоритм управления рассчитывает необходимые для движения по заданному полетному заданию силы и моменты и уставки исполнительных механизмов.

Комплекс моделирования
Для отладки, обучения оператора и демонстрации возможностей системы разработан программно-аппаратный комплекс моделирования дирижабля, работающий в связке с подключенной системой управления.