Actuality
Airships actuality is associated with aerostatic lift, as well as with the current new level of technical capabilities of production of airships. The new stage of airship development is evidenced by numerous reports about projects and tests of various designs of airships.
Reasons for automatic airships:
- Human mistake is excluded.
- For an airship with big dimensions pilot has difficulties to “feel” and control.
- Support system for pilot like a cruise-control.
- Take-off and landing operations are difficult for pilot in wind disturbances.
- Automatic stabilization of flight in conditions of high wind loads.
- Increased safety due to control system actions in emergency conditions (when pilot actions are limited or impossible).
- Transportation in deadly conditions, when pilot is impossible to control: high radiation, chemical or biological danger, etc.
Airships automatic Control Systems Design
Airships is the most attractive type of aircraft from the implementation of the automatic control point of view. Even in case of control system failure airship remains in the air by aerostatic lift. In the other hand, airships have a number of features that need to be taken into account in the development of control laws:
- Airship has a large surface area.
- The airship’s speed is comparable to the speed of the surrounding air.
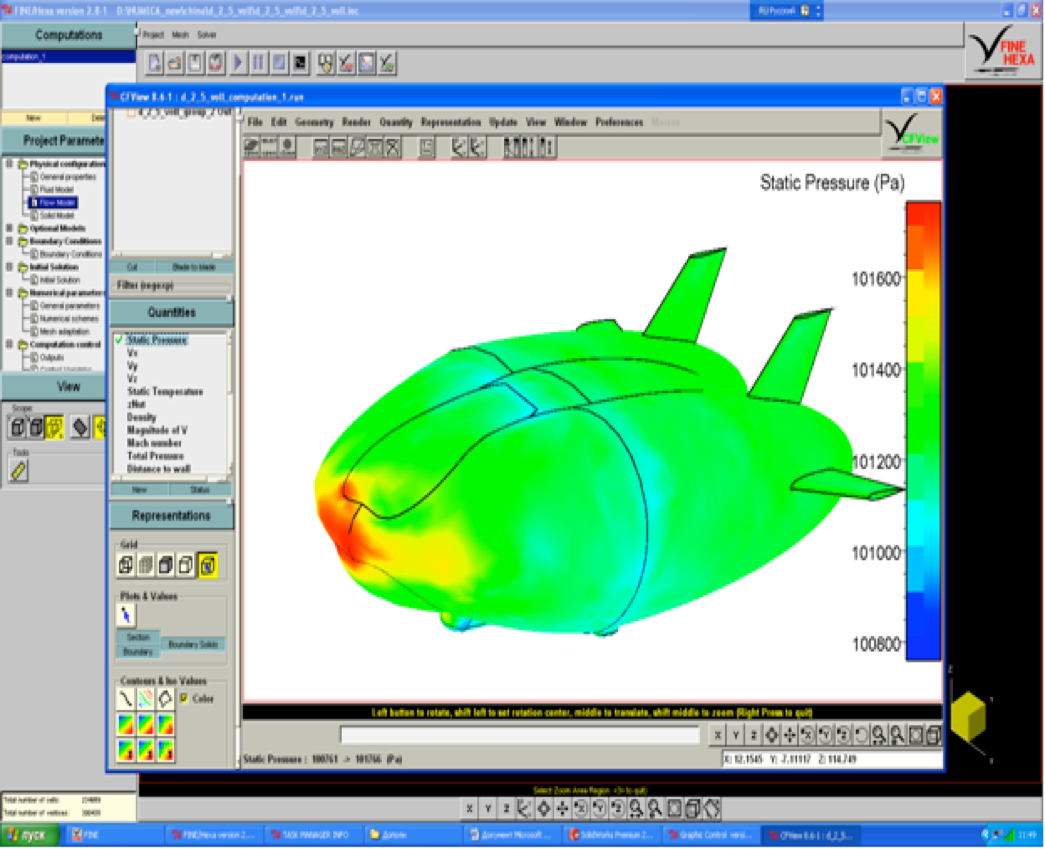
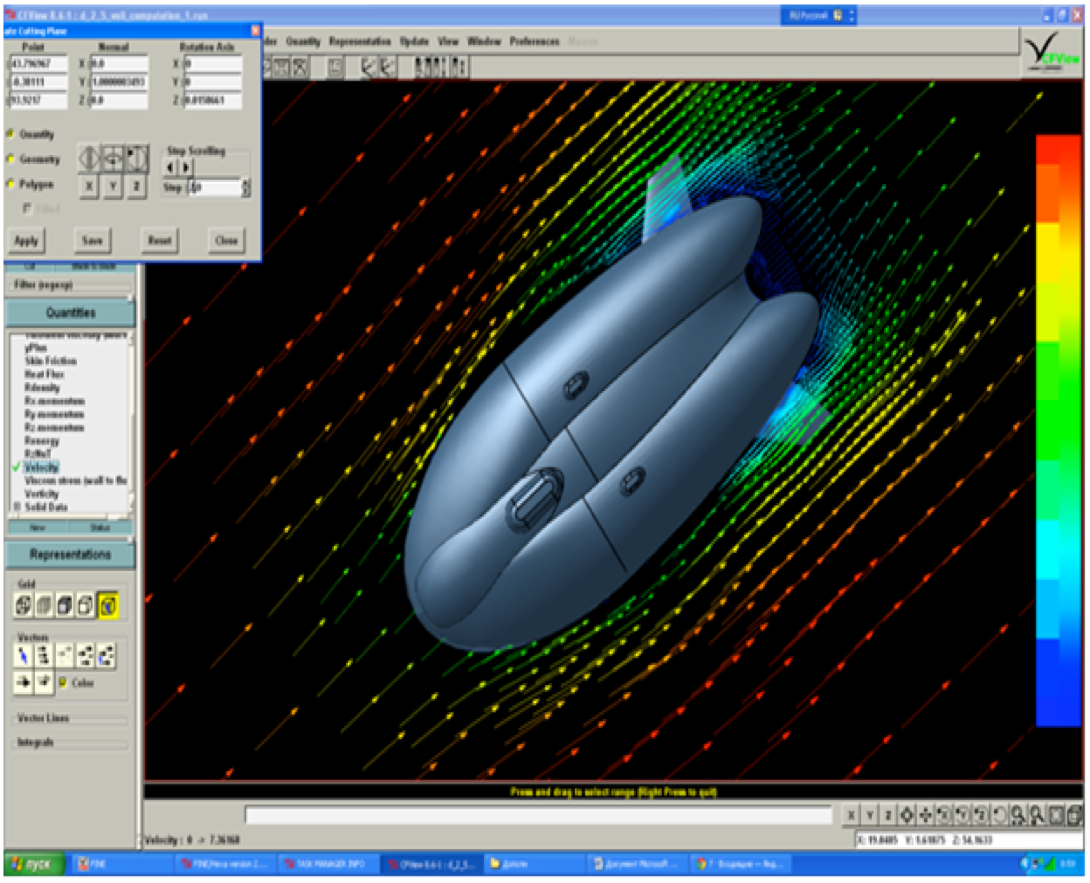
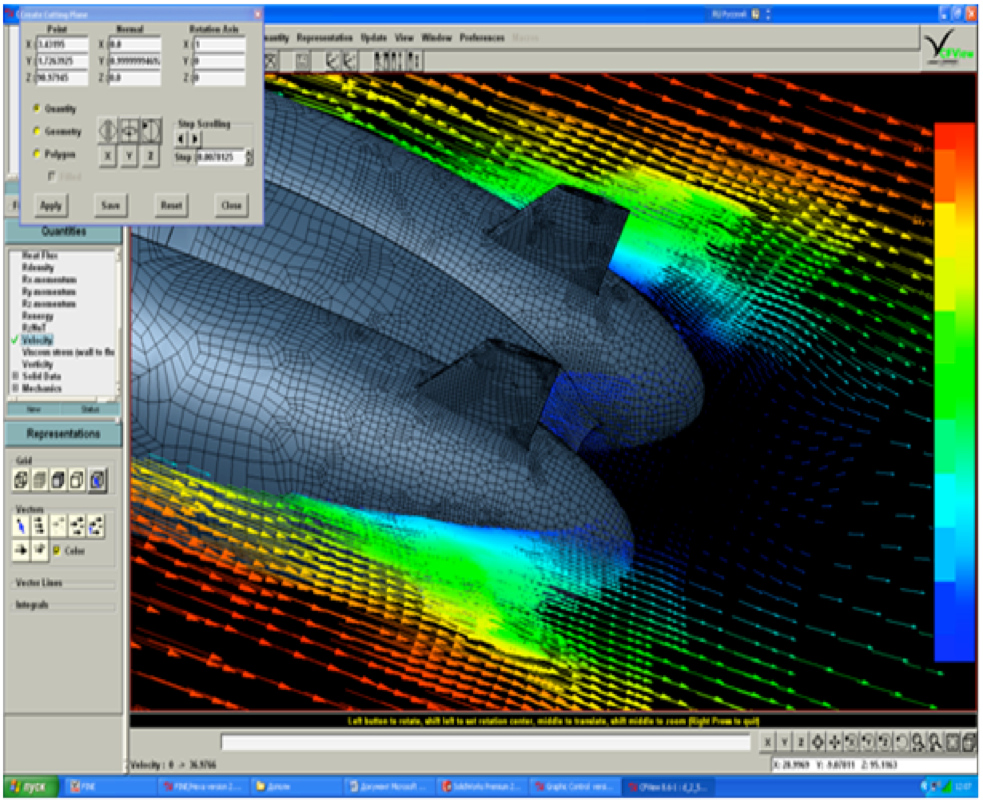
- Aerodynamic research should be performed for a wide range of airship flight parameters (airspeed, angle of attack and sideslip angle, angular frequencies and altitude). The natural experiments consume a lot of time and resources so it is appropriate to combine them with numerical methods.
We adhere to the following design steps of automatic control systems for airships:
- Mathematical modeling.
- Design of Control algorithm.
- Control system implementation.

Mathematical modeling
Mathematical model of the airship is constructed on the basis of the kinematics and dynamics of rigid body model, models of actuators and air-gas system.
Computations of aerodynamic coefficients, mass and inertia parameters and other parameters is carried out to define the parameters of a mathematical model of the airship.

The structure of the airships control systems
The main results of mathematical modeling:
- Controllability estimation results for various modes basing on the airship’s kinematics and dynamics equations.
- Relationship of aerodynamic coefficients to wind speed, attack and sideslip angles, angular speed and airship altitude.
- Relationship of aerodynamic forces and moments created by airship’s empennage to wind speed, attack angles, angular velocity and airship’s altitude.
- Relationships of the propeller’s thrusts to their rotation speeds, speed and altitude of the airship.
- Model of ballonets describing its influence on the airship’s mass and the value and application point of the gravity and Archimedes forces.
- Necessary thrusts and drive powers required for implementation of the preset trajectories at various speeds, attack and sideslip angles, altitudes and drive’s configurations.

Design of Control algorithm
The original patented algorithm calculates the required control (forces and moments and the settings of the actuators) for performing of a given flight task.

Airships control systems functional diagram
To account for the deformations, inaccuracies in definition of aerodynamics and added mass, unaccounted factors (ice, uneven heating) algorithms of robust estimation of external, parametric and structural perturbations are used.
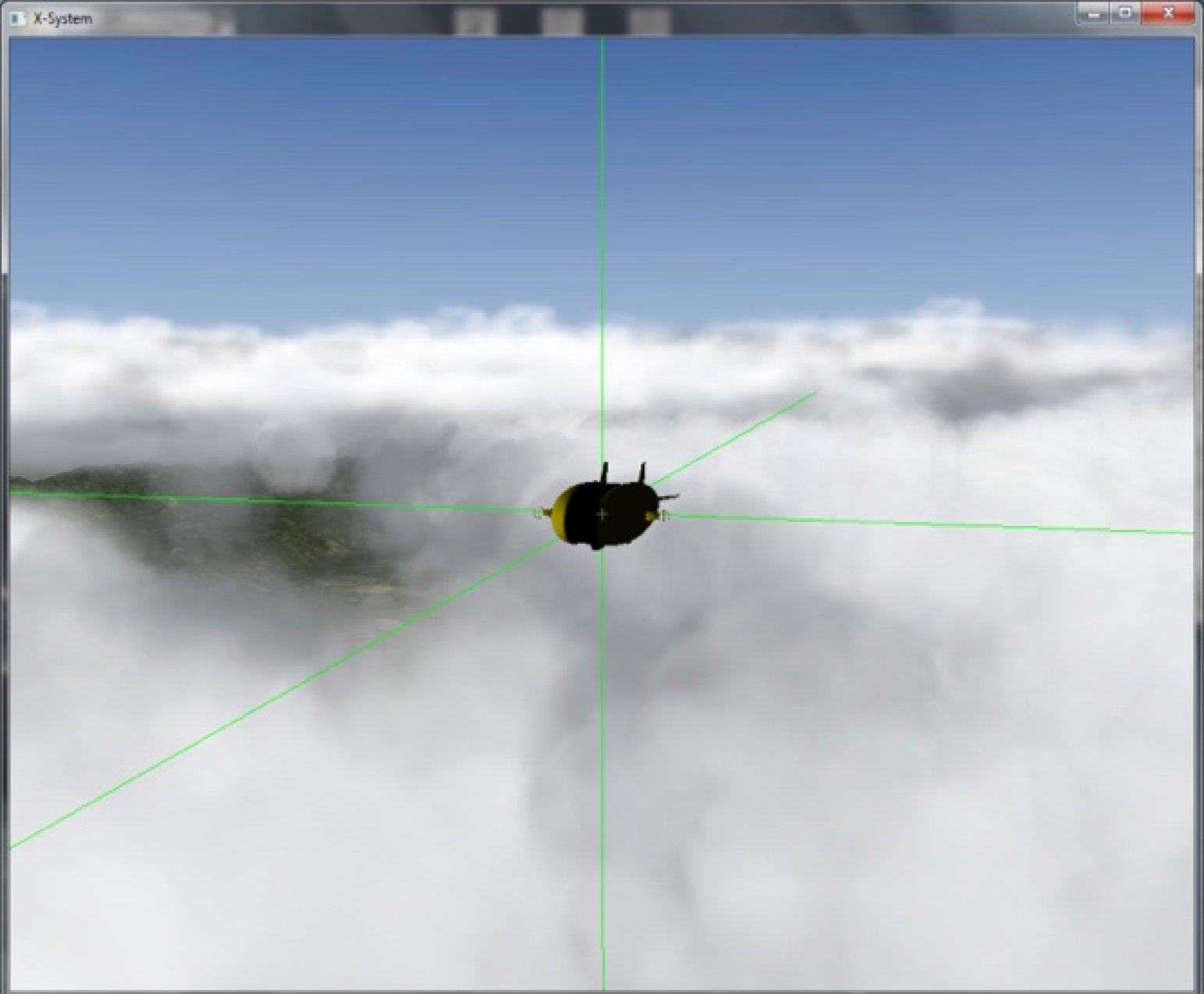
Control system implementation
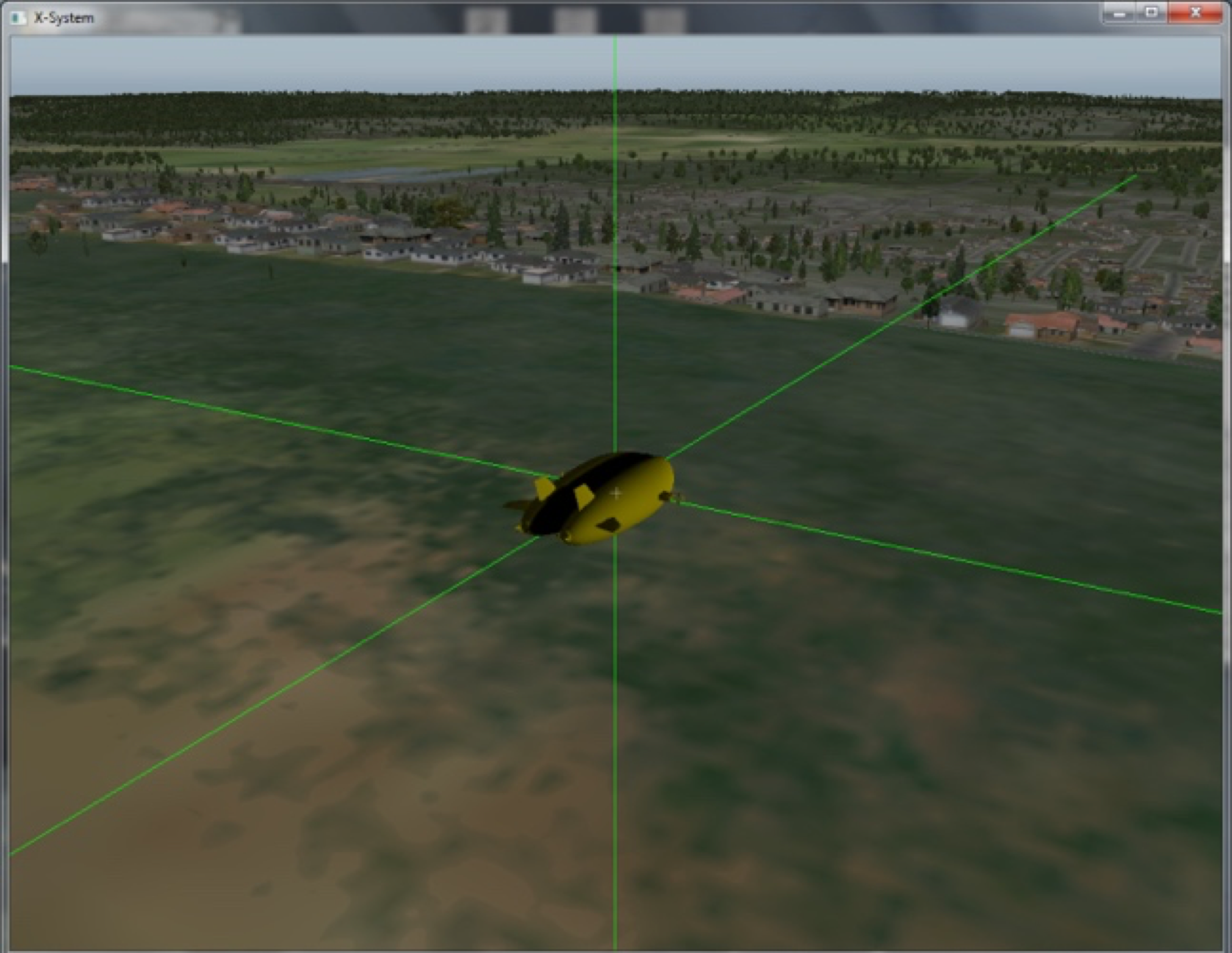
For debugging, operator training and demonstration airship software and hardware simulation developed, works in conjunction with a connected control system.

Control, navigation and telecommunications system has a modular architecture that makes it easier to set-up, maintenance and repair, as well as allows modifying the system to the requirements of the customer.

The structure of the airships control systems
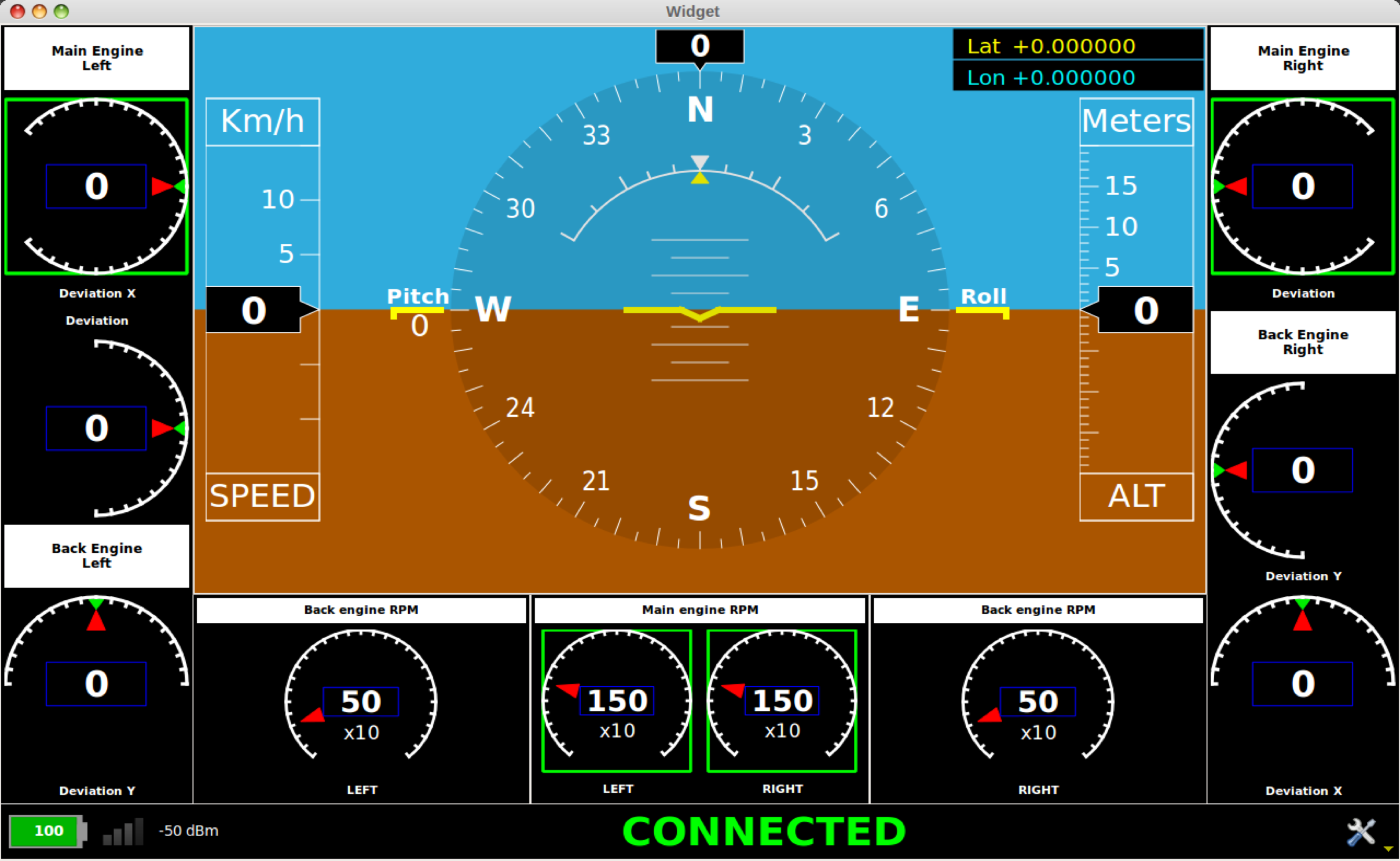
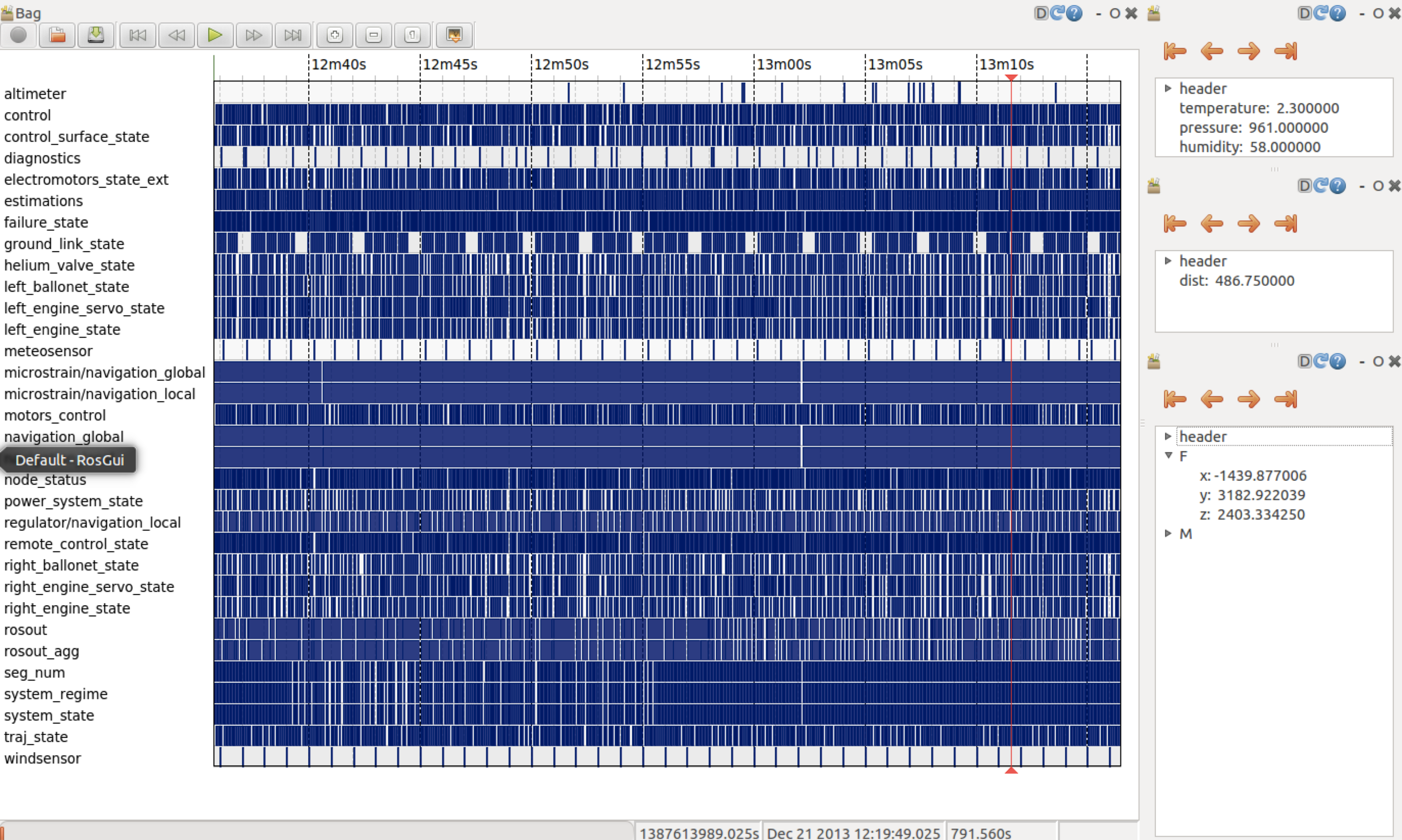
On-board computer software is designed based on advanced operating system and has a modular hierarchical structure. This allows to create different scenarios for its use, analyze the available data in the system and quickly make modifications to the system using modern development tools.
The software incorporates a means to record all flight data and playback and conversion for subsequent analysis.








Completed projects:
 |
Design, manufacture and delivery of control, navigation and telecommunications systems for a prototype of an unmanned high-altitude airship (near space aircraft platform control system) for the China’s Hunan Space Agency Booklet |
 |
European Commission grant project MAAT (Multibody Advanced Airship for Transport) Booklet |
 |
Research commissioned by Russian Ministry of Defense: |
 |
The initiative project on the development a robotic mini-airship “Sterkh” |
| A number of student projects |
Additional materials
Intellectual property
- Device of control of airship. The Russian patent for a utility model number 137812 from 05/02/2014
- The program of calculation and investigation of environment probabilistic model for motion planning system of autonomous stratospheric airship: a certificate of state registration of computer program number 2014613033
Publications
-
V.Kh. Pshikhopov, M. Yu. Medvedev, R.V. Fedorenko et al. Aeronautical сomplexes сontrol: theory and design technology [Text] – Moscow: FIZMATLIT, 2010. – 394 p.
-
R.V. Fedorenko. Algorithms of landing autopilot for robotic airship [Electronic resource] – Electronic Journal of Research and Innovation «Engineering Don messenger». – 2011– №1.–http://ivdon
.ru/uploaddir/ar ticles.371.big_i mage.doc. - R.V. Fedorenko. Structural – algorithmic and hardware organization of landing autopilot for robotic airship with visual navigation [Electronic resource] – «Science and education: electronic scientific and technical periodical».– 2011.– №9.– http://technomag
.edu.ru/doc/2141 19.html. - R.V. Fedorenko, B.V. Gurenko. Modeling complex of mobile objects movement on the basis of aeronautical vehicles and submersibles [Text].– Proceedings of SFU. Technical sciences. № 3 (116).– Taganrog: Publishing house of TTI SFU, 2011.– pp. 180-187.
- Pshikhopov, V., Medvedev, M., Kostjukov, V., Fedorenko, R. et al., «Airship Autopilot Design,» SAE Technical Paper 2011-01-2736, 2011, doi:10.4271/2011
-01-2736. - R.A.Neydorf, S.P.Novikov, R.V. Fedorenko. Control tasks and methods of airships multi-ballonet systems// Proceedings of the Eighth All-Russian scientific-pract
ical conference “Perspective Systems and Control Problems”. – Taganrog: Publishing house of TTI SFU, 2013. – pp. 247 – 256 - Neydorf, R., Novikov, S., and Fedorenko, R., «Continuous-Posi
tional Automatic Ballonet Control System for Airship» SAE Int. J. Aerosp. 6(2):598-606, 2013, doi:10.4271/2013 -01-2236. - V.Kh. Pshikhopov, M.Yu. Medvedev, R.V. Fedorenko et al. The system of position-traject
ory control of robotic aeronautical platform [Text]. Part 1. Mathematical Model // Mechatronics, Automation, Control. — 2013. — № 6 (147). — pp. 14-21 - V.Kh. Pshikhopov, M.Yu. Medvedev, R.V. Fedorenko et al. The system of position-traject
ory control of robotic aeronautical platform [Text]. Part 2. Control Algorithms // Mechatronics, Automation, Control. — 2013. — № 7 (148). — pp. 13-20 - V.Kh. Pshikhopov, M. Yu. Medvedev, R.V. Fedorenko et al., «Adaptive Control System Design for Robotic Aircrafts,» Robotics Symposium and Competition (LARS/LARC), 2013 Latin American, Arequipa, 2013, pp. 67-70.
- V.Kh. Pshikhopov, M. Yu. Medvedev, R.V. Fedorenko et al., «Mathematical model of robot on base of airship,» 52nd IEEE Conference on Decision and Control, Firenze, 2013, pp. 959-964.
- V.Kh. Pshikhopov, M.Yu. Medvedev, A.R. Gaiduk, R.V. Fedorenko, V.A. Krukhmalev, B.V. Gurenko, Position-Traject
ory Control System for Unmanned Robotic Airship, IFAC Proceedings Volumes, Volume 47, Issue 3, 2014, Pages 8953-8958, ISSN 1474-6670 - V.Kh. Pshikhopov, M. Yu. Medvedev, R.V. Fedorenko et al. Algorithms of a multiply position – trajectory control of mobile objects// Electronic Journal of Research and Innovation «Engineering Don messenger».- №4, 2014, url:ivdon.ru/ru/
magazine/archive /N4y2014/2579 (access free) – language-russian . - Pshikhopov, V., Medvedev, M., Krukhmalev, V., Fedorenko, R. et al., «Method of Docking for Stratospheric Airships of Multibody Transportation System» SAE Technical Paper 2014-01-2162, 2014, doi:10.4271/2014
-01-2162. - Roman Fedorenko, Victor Krukhmalev Indoor Autonomous Airship Control and Navigation System // MATEC Web of Conferences 42 01006 (2016) DOI: 10.1051/mateccon
f/20164201006 - R.A.Neydorf, A.A.Boldyreva. The MAAT system feeders ascending/descen
ding control volume principle. – Proceedings of SFU. Technical sciences. – 2013. — No 7(144). Thematic issue Intelligent CAD– pp.184 — 190. - Voloshin V., Chen Y., Neydorf R., Boldyreva A. Aerodynamic characteristic study and possible improvements of MAAT feeder airships. – Proceedings of SAE 2013 AeroTech Congress & Exhibition, 2013. – doi: 10.4271/2013-01-
2112. - A.A.Boldyreva. Efficiency of mass using in aerostat type aerial vehicles. — Perspective Systems and Control Problems // Proceedings of the 7-th All-Russian scientific-pract
ical conference – Taganrog: Publishing house of TTI SFU, 2012. – pp.112 — 117. - A.A.Boldyreva. Diurnal temperature changing of flight altitude of stratospheric airship and the methods of this compensation. – System analysis, control and information processing: Proceedings of the III International scientific seminar, Divnomorskoye settlement, 27 September — 2 October [Electronic resource] / DSTU. – Rostov on Don, 2012. — pp. 170 — 176.
- R.A.Neydorf, S.P.Novikov, A.A.Boldyreva. Ballonet subsystem of the airship state control and its mathematical model. – Innovation, ecology and resource-saving technologies. // Proceedings of the X Intern. scientific and engineering forum [Electronic resource] / DSTU. — Rostov on Don, 2012.— pp. 386 — 390.
- R.A.Neydorf, A.A.Boldyreva. Energetic problems of ascending control of MAAT system feeder. // Proceedings of the Eighth All-Russian scientific-pract
ical conference “Perspective Systems and Control Problems”. – Taganrog: Publishing house of TTI SFU, 2013. – pp. 274 — 282. - R.A.Neydorf, A.A.Boldyreva. Influence of MAAT feeder design features on tasks and control capabilities. // Proceedings of the Eighth All-Russian scientific-pract
ical conference “Perspective Systems and Control Problems”.- Taganrog: Publishing house of TTI SFU, 2013. — pp. 272 — 273.













