Актуальность
Актуальность создания роботизироанных морских подвижных объектов (МПО) обусловлена необходимостью
- экологического мониторинга водных ресурсов;
- картографии морских и речных судоходных каналов, портов, бухт, заводей;
- повышения уровня контроля морских акваторий;
- повышения эффективности освоения ресурсов в труднодоступных районах (Арктика и Дальний Восток);
- повышения интеллектуализации морского транспорта;
- повышения конкурентоспособности отечественного судостроения и снижения зависимости от зарубежных технологий.
Основные направления исследования и продукты
- Разработка систем интеллектуального планирования движений и адаптивного управления автономных необитаемых подводных аппаратов
- Разработка систем интеллектуального планирования движений и адаптивного управления автономных безэкипажных судов
- Разработка систем математического и полунатурного моделирования морских подвижных объектов(МПО)
- Разработка тренажёрных комплексов для операторов автономных морских подвижных объектов
Предлагаемые методы и подходы к решению поставленных задач
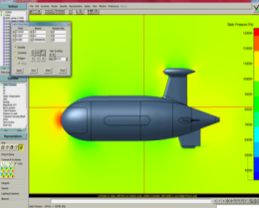
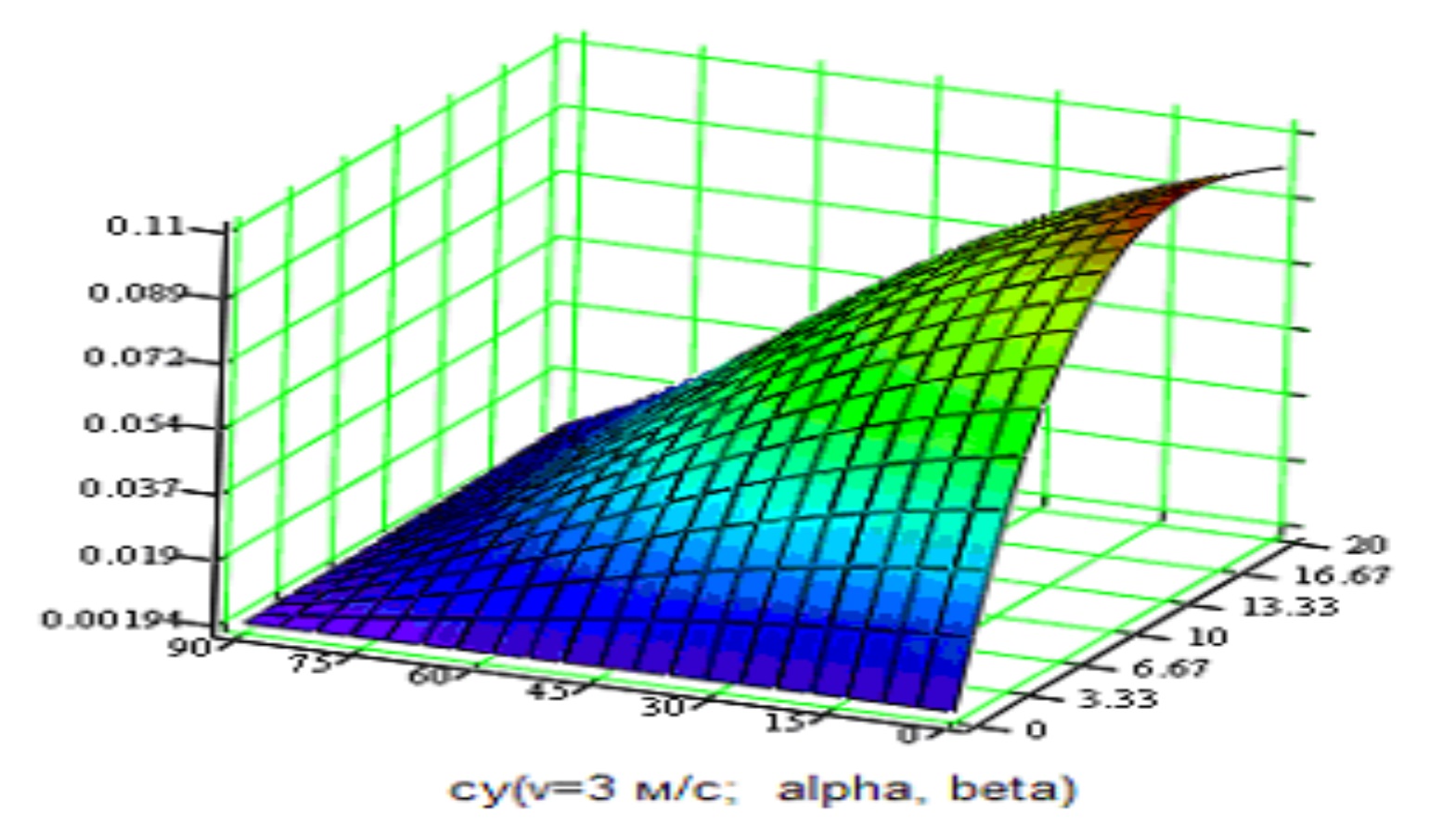
- Метод построения нелинейных многосвязных математических моделей с определением гидродинамических характеристик
- Метод позиционно-траекторного управления для построения автопилотов
- Методы комплексирования навигационных данных для повышения точности определения координат
- Теория синтеза нелинейных наблюдателей для оценки неопределенных внешних сил и неизвестных параметров МПО
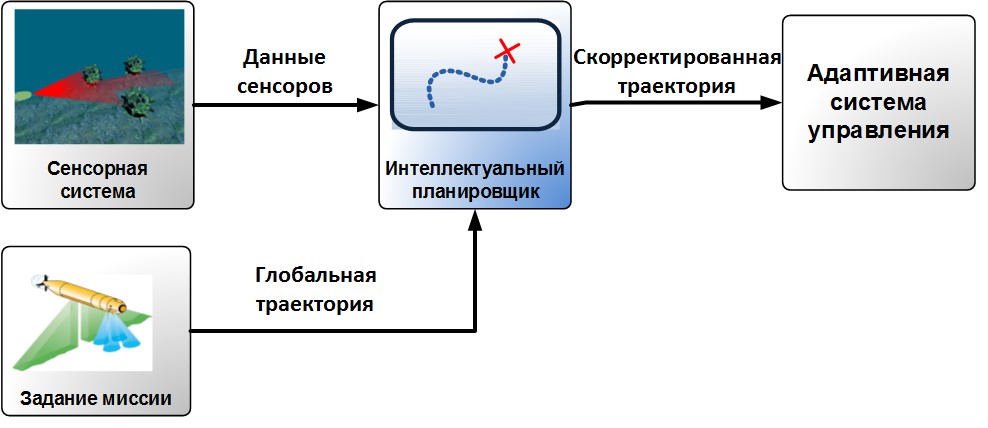
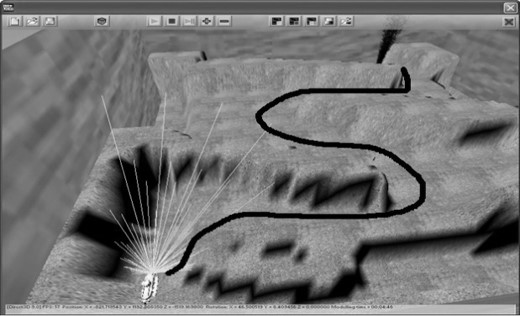
- Метод конструирования интеллектуальных планировщиков перемещений для обхода стационарных и подвижных препятствий
- Метод использования неустойчивых режимов работы системы управления для обхода препятствий при минимизации требований к сенсорной подсистеме МПО и вычислительным затратам
Предлагаемые систем автоматического управления морскими подвижными объектами
Как показывает обзор существующих систем управления МПО, современные подходы к конструированию систем обеспечивают заданное качество управления в узком диапазоне от заданного режима движения. В ситуации, когда скорость течения внешней среды превышает или сравнима со скорость МПО, условия разделения взаимосвязанного движения на отдельные каналы не выполняются, а углы дрейфа нельзя считать малыми. В этих случаях требуется планировать и реализовывать траекторию движения МПО с учетом многосвязности движения, используя внешние неуправляемые течения. Если, какое-либо возмущение (например, сильное течение, которое нельзя компенсировать полностью из-за энергетических ограничений) выведет МПО в область «больших» отклонений, то это может привести к нарушению устойчивости и, как следствие, аварийной или критической ситуации.В этой связи актуальной является проблема разработки методов позиционно-траекторного управления морскими роботизированными системами в экстремальных режимах и условиях априорной неопределенности среды.
При разработке систем управления МПО необходимо выполнить следующие этапы проектирования:
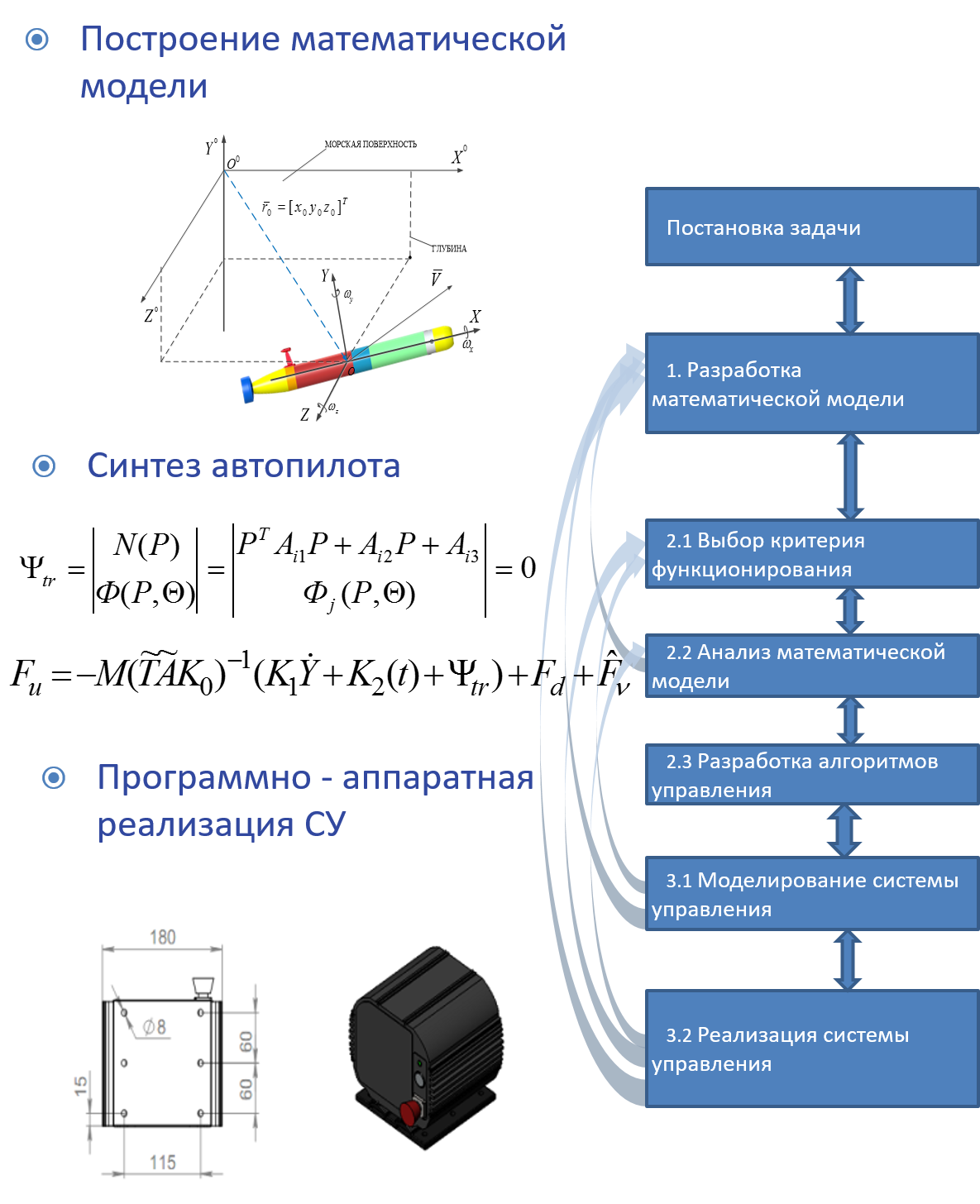
1. Построение математической модели
2. Синтез автопилота
3. Программно-аппаратная реализация
Этапы проектирования систем управления морскими подвижными объектами
Построение математической модели

Система координат подводного аппарата

Система координат надводного аппарата катамаранного типа
Адекватная математическая модель движения МПО необходима для разработки эффективной системы управления его движением в подводном режиме. Особое значение имеет адекватность математической модели при осуществлении указанных движений МПО, как необитаемого аппарата. Корректное построение математической моделиМПо в значительной степени определяет качество проектирования системы управления движением МПО и, в первую очередь, адекватность результатов проектирования реальным свойствам разрабатываемой системы управления.


Синтез автопилота и алгоритмов функционирования
Оригинальный запатентованный алгоритм управления обеспечивает формирование управляющих воздействий на исполнительные механизмы МПО для выполнения следующих задач :
- стабилизация в заданной точке пространства базовых координат и, в случае необходимости, с желаемыми значениями углов ориентации;
- движение вдоль заданных траекторий с постоянной скоростью V и заданной ориентацией;
- перемещение в заданную точку вдоль заданной траектории, с заданной ориентацией и без предъявления дополнительных требований к скорости и др..
Упрощенная структура автопилота
Программно-аппаратная реализация
Мы предлагаем программно-аппаратный комплекс, который реализует алгоритмы упрвления, планирования, навигации,взаимодействия оборудования, и включает в себя:
бортовой вычислитель
наземный или мобильный пункт управления
навигационную систему
сенсорную подсистему, в том числе систему технического зрения

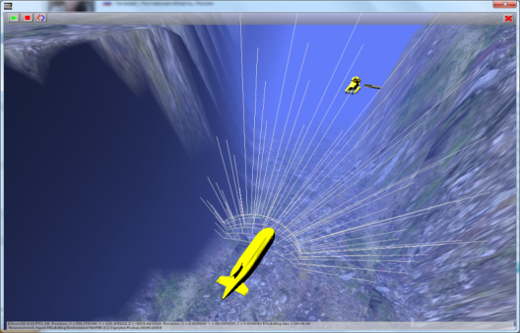
Для отработки программно-алгоритмической части системы управления МПО разрабатывается программно-моделирующий комплекс. Функциональность предлагаемого комплекса позволяет симулировать внешнюю среду, датчики, навигационную систему и систему технического зрения, так же задавать из погрешности.



После отработки алгоритмы управления и реализации их на бортовом вычилслителе проводим верификацию программного обеспечения путем полунатурного моделирования

Выполненные проекты
- ОКР «Разработка интегрированного комплекса навигации и управления движением для автономных необитаемых подводных аппаратов», 2010 г., ОКБ ОТ РАН
- НИР«Разработка интегрированной системы управления и навигации автономных необитаемых подводных аппаратов для решения задач разведки, патрулирования и поисково-спасательных мероприятий», 2012 г. ЮФУ
- НИР «Разработка интеллектуальной системы управления движением автономных необитаемых подводных аппаратов»,2012-2013 г, ИПМТ ДВО РАН
- ОКР «Разработка системы управления типовых платформ АНПА» 2012 — 2014 г, «ЦНИИ «Курс»
- ОКР «Разработка технического проекта ряда перспективных типовых платформ АНПА», 2012 — 2014 г, «ЦНИИ «Курс»
- НИР «Разработка автономной робототехнической системы на базе надводного мини-корабля «, 2013, ЮФУ
- НИР «Разработка метода аналитического синтеза оптимальных многосвязных нелинейных систем управления», 2010 – 2012 г., грант РФФИ.
- НИР «Разработка теоретических основ построения и исследование систем управления подвижными объектами, функционирующими в априори неформализованных средах, с использованием неустойчивых режимов», 2010 – 2012 г., грант РФФИ.
- НИР «Теория и методы позиционно-траекторного управления морскими роботизированными системами в экстремальных режимах и условиях неопределенности среды» (№114041540005). 2014-2016
- РФФИ 16-08-00013 Разработка метода двухконтурной адаптации систем позиционно-траекторного управления с использованием робастных наблюдателей возмущений и эталонных моделей. 2016-2018
- ОКР «Разработка бэзэкипажного катера для экологического мониторинга азвского моря»
 Проект по разработке автономного мини-катера
Проект по разработке автономного мини-катера
 Проект по разработке системы автоматического управления типовыми платформами АНПА
Проект по разработке системы автоматического управления типовыми платформами АНПА
 Инициативный проект по разработке интеллектуальной системы управления надводным катером
Инициативный проект по разработке интеллектуальной системы управления надводным катером
Патенты







Дополнительные материалы
Публикации
- Пшихопов В.Х., Медведев М.Ю. Управление подвижными объектами. – М.: НАУКА, 2011 г. – 350 с.
- Пшихопов В.Х. и др. Структурная организация систем автоматического управления подводными аппаратами для априори неформализованных сред // Информационно-измерительные и управляющие системы. М.:Радиотехника. 2006.- №1-3- Т4 — С. 73-78.
- Пшихопов В.Х., Медведев М.Ю Адаптивное управление нелинейными объектами одного класса с обеспечением максимальной степени устойчивости Известия ЮФУ. Технические науки. Тематический выпуск «Перспективные системы и задачи управления». – Таганрог: ТТИ ЮФУ.- 2012.-№3(116) – С.180-186
- Гуренко Б.В. Построение и исследование математической модели подводного аппарата // Специальный выпуск журнала «Вопросы оборонной техники. Серия 9», 2010 г. — С. 35-38.
- Пшихопов В.Х., Суконки С.Я., Нагучев Д.Ш., Стракович В.В., Медведев М.Ю., Гуренко Б.В. , Костюков В.А. Автономный подводный аппарат «СКАТ» для решения задач поиска и обнаружения заиленных объектов // Известия ЮФУ. Технические науки. Тематический выпуск «Перспективные системы и задачи управления». – Таганрог: ТТИ ЮФУ.-2010.-№3(116) – С.153-163.*
- Гуренко Б.В. Структурный синтез автопилотов для необитаемых подводных аппаратов // Известия Кабардино-Балкарского научного центра РАН, номер 1–2011 г.
- Гуренко Б.В., Федоренко Р.В. Комплекс моделирования движений подвижных объектов на базе воздухоплавательных и подводных аппаратов // Известия ЮФУ. Технические науки. Тематический выпуск «Перспективные системы и задачи управления». – Таганрог: ТТИ ЮФУ.- 2011.-№3(116) – С.180-186
- Гуренко Б.В. Структурная организация систем автоматического управления подводными глайдерами // Известия ЮФУ. Технические науки. Тематический выпуск «Перспективные системы и задачи управления». – Таганрог: ТТИ ЮФУ.- 2011. — №3(116) – С.199-205
- Пшихопов В.Х., М.Ю. Медведев, Б.В. Гуренко, А.А. Мазалов Адаптивное управление нелинейными объектами одного класса с обеспечением максимальной степени устойчивости // Известия ЮФУ. Технические науки. Тематический выпуск «Перспективные системы и задачи управления». – Таганрог: ТТИ ЮФУ.- 2012.-№3(116) – С.180-186
- Б.В. Гуренко, О.К. Ермаков Обзор и анализ состояния современной надводной робототехники XI Всероссийской научной конференции молодых ученых, студентов и аспирантов «Техническая кибернетика, радиоэлектроника и системы управления»: Сборник материалов. – Таганрог: Изд-во ЮФУ, 2012,–Т. 1, С. 211-212
- Pshikhopov, V.Kh., Medvedev, M.Yu., Gaiduk, A.R., Gurenko, B.V., Control system design for autonomous underwater vehicle, 2013, Proceedings — 2013 IEEE Latin American Robotics Symposium, LARS 2013, pp. 77-82, doi:10.1109/LARS.2013.61.
- Пшихопов В.Х., Гуренко Б.В. Разработка и исследование математической модели автономного надводного мини-корабля «Нептун» [Электронный ресурс] //»Инженерный вестник Дона», 2013, №4. – Режим доступа: http://www.ivdon.ru/ /ru/magazine/archive/n4y2013/1918 (доступ свободный) – Загл. с экрана. – Яз. Рус
- Пшихопов В.Х., Б.В. Гуренко Синтез и исследование авторулевого надводного мини-корабля «Нептун» [Электронный ресурс] // «Инженерный вестник Дона», 2013, №4. – Режим доступа: http://www.ivdon.ru/ru/magazine/archive/ /n4y2013/1919 (доступ свободный) – Загл. с экрана. – Яз. рус.
- Гуренко Б.В. Реализация и экспериментальное исследование авторулевого автономного надводного мини-корабля «Нептун» [Электронный ресурс] // «Инженерный вестник Дона», 2013, №4.Режим доступа: http://www.ivdon.ru/ru/magazine/archive/n4y2013/1920(доступ свободный) – Загл. с экрана. – Яз. рус.
- Программное обеспечение бортовой системы управления автономной робототехнической системы на базе надводного мини-корабля: свидетельство о государственной регистрации программы для ЭВМ №2013660412 / Пшихопов В.Х, Гуренко Б.В., Назаркин А.С. – Зарегистрировано в Реестре программ для ЭВМ 5 ноября 2013 г.
- Программное обеспечение навигационной системы автономной робототехнической системы на базе надводного мини-корабля: свидетельство о государственной регистрации программы для ЭВМ №2013660554 / Гуренко Б.В., Котков Н.Н. – Зарегистрировано в Реестре программ для ЭВМ 11 ноября 2013 г.
- Программно-моделирующий комплекс автономных морских подвижных объектов: свидетельство о государственной регистрации программы для ЭВМ №2013660212 / Пшихопов В.Х., Медведев М.Ю., Гуренко Б.В. – Зарегистрировано в Реестре программ для ЭВМ 28 октября 2013 г.
- Программное обеспечение наземного пункта управления автономной робототехнической системы на базе надводного мини-корабля: свидетельство о государственной регистрации программы для ЭВМ №2013660554 / Гуренко Б.В., Назаркин А.С.– Зарегистрировано в Реестре программ для ЭВМ 28 октября 2013.
- Kh. Pshikhopov, M. Y. Medvedev, and B. V. Gurenko, “Homing and Docking Autopilot Design for Autonomous Underwater Vehicle”, Applied Mechanics and Materials. Vols. 490-491, pp. 700-707, 2014, doi:10.4028/www.scientific.net/AMM.490-491.700.
- Pshikhopov, V.K., Fedotov, A.A., Medvedev, M.Y., Medvedeva, T.N. & Gurenko, B.V. 2014, «Position-trajectory system of direct adaptive control marine autonomous vehicles», 2014 the 4th International Workshop on Computer Science and Engineering — Summer, WCSE 2014.
- Pshikhopov, V., Chernukhin, Y., Fedotov, A., Guzik, V., Medvedev, M., Gurenko, B., Piavchenko, A., Saprikin, R., Pereversev, V. & Krukhmalev, V. 2014, «Development of intelligent control system for autonomous underwater vehicle», 2014 the 4th International Workshop on Computer Science and Engineering-Winter, WCSE 2014.
- Пшихопов В.Х, Медведев М.Ю., Федоренко Р.В., Гуренко Б.В., Чуфистов В.М., Шевченко В.А. Алгоритмы многосвязного позиционно-траекторного управления подвижными объектами // Инженерный вестник дона #4, 2014, url:ivdon.ru/ru/magazine/archive/N4y2014/2579 (доступ свободный) – Загл. с экрана. – Яз. рус.
- Пшихопов В.Х, Федотов А.А, Медведев М.Ю., Медведева Т.Н., Гуренко Б.В., Позиционно-траекторная система прямого адаптивного управления морскими подвижными объектами // Инженерный вестник дона #3, 2014, url:ivdon.ru/ru/magazine/archive/n3y2014/2496 (доступ свободный) – Загл. с экра-на. – Яз. рус.
- Гуренко Б.В. Построение и исследование математической модели автономного необитаемого подводного аппарата // Инженерный вестник дона #4, 2014, url:ivdon.ru/ru/magazine/archive/N4y2014/2626 (доступ свободный) – Загл. с экра-на. – Яз. рус.
- Гуренко Б.В., Федоренко Р.В., Назаркин А.С. Система управления автономного надводного мини-корабля // Современные проблемы науки и образования. – 2014. – № 5; url:www.science-education.ru/119-14511 (дата обращения: 10.09.2014).
- Пшихопов В.Х., Чернухин Ю.В., Федотов А.А., Гузик В.Ф., Медведев М.Ю., Гуренко Б.В., Пьявченко А.О., Сапрыкин Р.В., Переверзев В.А., Приемко А.А. Разработка интеллектуальной системы управления автономного подводного аппарата // Известия ЮФУ. Технические науки. Таганрог: ТТИ ЮФУ – 2014. – № 3(152). – С. 87 – 101.
- Пшихопов В.Х., Гуренко Б.В., Медведев М.Ю., Маевский А.М., Голосов С.П. Оценивание аддитивных возмущений АНПА робастным наблюдателем с нелинейными обратными связями // Известия ЮФУ. Технические науки. Таганрог: ТТИ ЮФУ – 2014. – № 3(152). – С. 128 – 137.
- Пшихопов В.Х., Федотов А.А., Медведев М.Ю., Медведева Т.Н., Гуренко Б.В., Задорожный В.А. Позиционно-траекторная система прямого адаптивного управления морскими подвижными объектами // Сборник материалов Девятой Всероссийской научно-практической конференции «Перспективные системы и задачи управления». Таганрог. Изд-во ЮФУ, 2014. – С. 356 – 263.
- Гуренко Б.В., Федоренко Р.В., Береснев М.А., Сапрыкин Р.В., Переверзер В.А., Разработка симулятора автономного необитаемого подводного аппарата // Инженерный вестник дона #3, 2014, http://ivdon.ru/ru/magazine/archive/n3y2014/2504. (доступ свободный) – Загл. с экрана. – Яз. рус.
- Копылов С.А., Федоренко Р.В., Гуренко Б.В., Береснев М.А. Программный комплекс для обнаружения и диагностики аппаратных отказов в роботизированных морских подвижных объектах // Инженерный вестник дона #3, 2014, url:ivdon.ru/ru/magazine/archive/n3y2014/2526. (доступ свободный) – Загл. с экрана. – Яз. рус.
- Gurenko, «Mathematical Model of Autonomous Underwater Vehicle,» Proc. of the Second Intl. Conf. on Advances In Mechanical and Robotics Engineering — AMRE 2014, pp. 84-87, 2014, doi:10.15224/ 978-1-63248-031-6-156
- Гайдук А.Р. Плаксиенко Е.А. Гуренко Б.В. К синтезу систем управления с частично заданной структурой // Научный вестник НГУ. Новосибирск, №2(55) 2014, С. 19-29.
- Гайдук А.Р., Пшихопов В.Х., Плаксиенко Е.А., Гуренко Б.В. Оптимальное управление нелинейными объектами с применением квазилинейной формы // Наука и образование на рубеже тысячелетий. Сб. научн.-исслед. работ КГТИ. Вып.1, Кисловодск. 2014 с 35-41
- Гуренко Б.В., Копылов С.А., Береснев М.А. Разработка схемы диагностики отказов подвижных объектов // Международный научный институт Educatio. — 2014. — №6. — с.49-50.
- Устройство управления подводным аппаратом: Патент на полезную модель №137258 / Пшихопов В.Х., Дорух И.Г., Гуренко Б.В. – Зарегистрировано в Государственном реестре полезных моделей РФ 10 февраля 2014 г.
- Система управления подводным аппаратом (Патент на изобретение №2538316) Зарегистрировано в Государственном реестре изобретений РФ 19 ноября 2014 г. 1 стр. Пшихопов В.Х., Дорух И.Г.
- Pshikhopov, Y. Chernukhin, V. Guzik, M. Medvedev, B. Gurenko, A. Piavchenko, R. Saprikin, V. Pereversev, V. Krukhmalev, «Implementation of Intelligent Control System for Autonomous Underwater Vehicle,» Applied Mechanics and Materials, Vols 701 — 702, pp. 704-710, 2015, doi: 10.4028/www.scientific.net/AMM.701-702.704
- Gurenko, R. Fedorenko, A. Nazarkin, «Autonomous Surface Vehicle Control System,» Applied Mechanics and Materials, Vols 704, pp. 277-282, 2015, doi: 10.4028/www.scientific.net/AMM.704.277
- А.Р. Гайдук, Б.В. Гуренко, Е.А. Плаксиенко, И.О. Шаповалов Разработка алгоритмов управления безэкипажным катером, как многомерным нелинейным объектом // Известия ЮФУ. Технические науки. – 2015. – № 1. – С. 250 – 261.
- Б.В. Гуренко Разработка алгоритмов сближения и стыковки автономного необитаемого подводного аппарата с подводной станцией базирования // Известия ЮФУ. Технические науки. – 2015. – № 2. – С. 162 – 175.
- Пшихопов В.Х., Медведев М.Ю., Гуренко Б.В. Алгоритмы адаптивных позиционно-траекторных систем управления подвижными объектами Проблемы управления, М.: – 2015 г., вып. 4, С. 66 –76 .
- Gurenko, R.Fedorenko, M.Beresnev, R. Saprykin, «Development of Simulator for Intelligent Autonomous Underwater Vehicle», Applied Mechanics and Materials, Vols. 799-800, pp. 1001-1005, 2015, doi: http://dx.doi.org/10.4028/www.scientific.net/AMM.799-800.1001
- Р.В. Федоренко, Б.В. Гуренко Планирование траектории автономного мини-корабля // Инженерный вестник Дона. – 2015. – №4. – url: ivdon.ru/ru/magazine/archive/n4y2015/3280
- Б.В. Гуренко, А.С. Назаркин Реализация и идентификация параметров автономного необитаемого подводного аппарата типа глайдер // инженерный вестник Дона. – 2015. – №4. – url: ivdon.ru/ru/magazine/archive/n4y2015/3288
- Гуренко Б.В., Назаркин А.С. Дистанционное управление надводным роботизированным катером // н.т.к., посв. Дню Российской науки и 100-летию ЮФУ. Сборник материалов конференции. — Ростов-на-Дону: Изд-во ЮФУ, 2015. — с. 158-159
- Костюков В.А., Маевский А.М., Гуренко Б.В. Математическая модель надводного мини-корабля // Инженерный вестник Дона. – 2015. – №4. – url: http://ivdon.ru/ru/magazine/archive/n3y2015/3297
- Костюков В.А., Кульченко А.Е., Гуренко Б.В. Методика расчета гидродинамических коэффициентов АНПА // Инженерный вестник Дона. – 2015. – №3. – url: ivdon.ru/ru/magazine/archive/n3y2015/3226
- Pshikhopov, M. Medvedev, B. Gurenko, «Development of Indirect Adaptive Control for Underwater Vehicles Using Nonlinear Estimator of Disturbances», Applied Mechanics and Materials, Vols. 799-800, pp. 1028-1034, 2015, doi:10.4028/www.scientific.net/AMM.799-800.1028
- Gurenko, A. Beresnev, «Development of Algorithms for Approaching and Docking Underwater Vehicle with Underwater Station «, MATEC Web of Conferences, Vol. 26, 2015, doi: dx.doi.org/10.1051/matecconf/2015260400
- Gurenko, R.Fedorenko, M.Beresnev, R. Saprykin, «Development of Simulator for Intelligent Autonomous Underwater Vehicle», Applied Mechanics and Materials, Vols. 799-800, pp. 1001-1005, 2015, doi: http://dx.doi.org/10.4028/www.scientific.net/AMM.799-800.1001
- Гуренко Б.В., Федоренко Р.В. Программный комплекс виртуального моделирования применения автономного необитаемого подводного аппарата (заявка на регистрацию программы для ЭВМ) (рег. № ФИПС №2015660714 от 10.11.2015.)
- Пшихопов В.Х., Гуренко Б.В. Разработка математических моделей подводных аппаратов: учебное пособие. – Таганрог: Изд-во ЮФУ, 2015. – 46 с
- Костюков В.А., Кульченко А.Е., Гуренко Б.В. Процедура исследования параметров модели подвижного подводного объекта // Сб. ст. по материалам XXXVI-XXXVII междунар. науч.-практ. конф. № 11-12 (35). — Новосибирск: Изд. АНС «СибАК», 2015. — с.75-59
- Kostukov, A. Kulchenko, B. Gurenko, «A hydrodynamic calculation procedure for UV using CFD», in proceedings of International Conference on Structural, Mechanical and Materials Engineering (ICSMME 2015), 2015, doi:10.2991/icsmme-15.2015.40
- Gaiduk, B. Gurenko, E. Plaksienko, I. Shapovalov, M. Beresnev, «Development of Algorithms for Control of Motor Boat as Multidimensional Nonlinear Object», MATEC Web of Conferences, Vol. 34, 2015, http://dx.doi.org/10.1051/matecconf/20153404005
- Б.В. Гуренко, И.О. Шаповалов, В.В. Соловьев, М.А. Береснев Построение и исследование подсистемы планирования траектории перемещения для системы управления автономным подводным аппаратом // Инженерный вестник Дона. – 2015. – №4. – url: ivdon.ru/ru/magazine/archive/n4y2015/3383
- Pshikhopov, V.a , Medvedev, M.a , Gurenko, B.b , Beresnev, M.a Basic algorithms of adaptive position-path control systems for mobile units ICCAS 2015 — 2015 15th International Conference on Control, Automation and Systems, Proceedings23 December 2015, Article number 7364878, Pages 54-59 DOI: 10.1109/ICCAS.2015.7364878
- Pshikhopov, M. Medvedev, V. Krukhmalev,V. Shevchenko Base Algorithms of the Direct Adaptive Position-Path Control for Mobile Objects Positioning. Applied Mechanics and Materials Vol. 763 (2015) pp 110-119 © (2015) Trans Tech Publications, Switzerland. doi:10.4028/www.scientific.net/AMM.763.110
- Пшихопов В.Х., Гуренко Б.В., Федоренко Р.В., Программное обеспечение бортовой адаптивной системы управления автономного необитаемого подводного аппарата (Зарегистрировано в Реестре программ для ЭВМ 11 января 2016 г) (рег. № 2016610059 от 11.01.2016)
- Vyacheslav Pshikhopov, Boris Gurenko, Maksim Beresnev, Anatoly Nazarkin IMPLEMENTATION OF UNDERWATER GLIDER AND IDENTIFICATION OF ITS PARAMETERS Jurnal Teknologi Vol 78, No 6-13 DOI: http://dx.doi.org/10.11113/jt.v78.9281
- Fedorenko, B. Gurenko, “Local and Global Motion Planning for Unmanned Surface Vehicle”, MATEC Web of Conferences, Vol. 45, 2016, doi: http://dx.doi.org/10.1051/matecconf/20164201005







