Актуальность
Одной из наиболее интенсивно развивающихся областей, требующих постоянного совершенствования теории и практики управления, является управление движением.

В настоящее время к актуальным и нерешенным в требуемой степени задачам управления движением относится построение управления нелинейными, многосвязными системами, автономно функционирующими в условиях неопределенности параметров и возмущений, наличия стационарных и нестационарных препятствий. Для функционирования автономных объектов определяющим является уровень планирования движения, который должен обеспечивать формирование промежуточных целей функционирования и функционирование подвижного объекта в средах со стационарными и нестационарными препятствиями.
Таким образом, структура системы управления движением автономного подвижного объекта должна включать в себя уровень интеллектуального планирования и согласованный с ним регуляторный уровень.
Реализация такой структуры в рамках системы позиционно-траекторного управления позволяет в полной мере реализовать регуляторный уровень и ряд функций уровня планирования. Кроме того, системы позиционно-траекторного управления позволяют эффективно сопрягать планировщик с регуляторным уровнем.
Основные проблемы при синтезе и реализации таких систем управления определяются рядом факторов. Первый из них заключается в разделении исходно многосвязных моделей объектов управления, что, с одной стороны, упрощает процедуру синтеза и структуру системы управления, с другой стороны – не позволяет достичь требуемых качественных показателей функционирования замкнутой системы. Вторым фактором, определяющим возможность организации заданного характера движения ПО в среде с препятствиями, является отсутствие эффективных методов сопряжения подсистем планирования перемещений (стратегического уровня системы управления) с тактическим, регуляторным уровнем.
Особенности систем позиционно-траекторного управления на основе неустойчивых режимов
Области применения: системы планирования траекторий перемещения мобильных роботов, функционирующих в космическом пространстве, воздушной, водной среде и на земной поверхности.
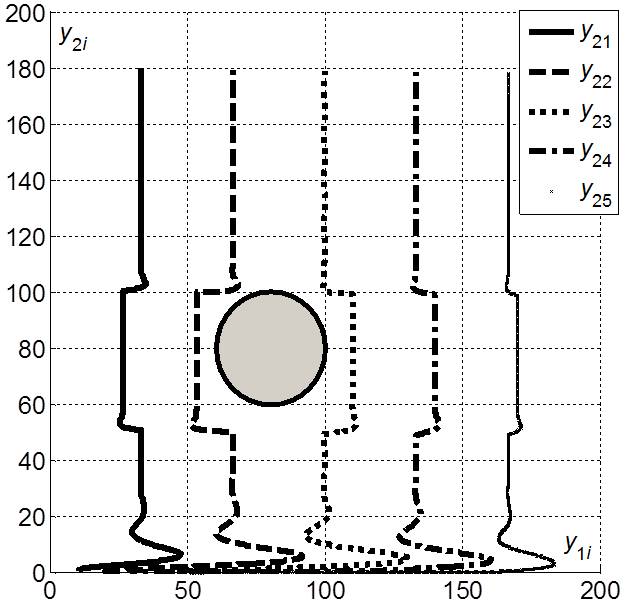
Отличительные черты: задание требований к траектории перемещения в виде линейных и квадратичных форм, обеспечивается асимптотическая устойчивость спланированных траекторий в нормальном режиме работы, искусственное введение объектов в неустойчивый режим с помощью бифуркационного параметра для выхода из затруднительных ситуаций.
Преимущества перед другими подходами: небольшой объем требуемых априорных данных, не требуется предварительное картографирование среды, простота реализации, сопряжение подсистем планирования перемещений (стратегического уровня системы управления) с тактическим, регуляторным уровнем.
Примеры применения систем позиционно-траекторного управления на основе неустойчивых режимов
Реализация сложных траекторий перемещения автономным безэкипажным катером
Публикации
1. Pshikhopov, V., Medvedev, M., Gaiduk, A., Kolesnikov, A. Control method for heterogeneous vehicle groups control in obstructed 2-D environments // Lecture Notes in Computer Science (including subseries Lecture Notes in Artificial Intelligence and Lecture Notes in Bioinformatics), 2016, 9812, pp. 40-47.
2. Pshikhopov, V., Gurenko, B., Beresnev, M., Nazarkin, A. Implementation of underwater glider and identification of its parameters // Jurnal Teknologi 78 (6-13), pp. 109-114.
3. Pshikhopov, V., Medvedev, M., Kolesnikov, A., Fedorenko, R., Gurenko, B. Decentralized Control of a Group of Homogeneous Vehicles in Obstructed Environment // Journal of Control Science and Engineering 2016, 7192371.
4. Pshikhopov, V., Medvedev, M., Gurenko, B., Beresnev, M. Basic algorithms of adaptive position-path control systems for mobile units // ICCAS 2015 — 2015 15th International Conference on Control, Automation and Systems, Proceedings.
5. Pshikhopov, V., Gurenko, B., Beresnev, M.Research of algorithms for approaching and docking underwater vehicle with underwater station // MATEC Web of Conferences, 2015, 34, 04006.
6. Pshikhopov, V.K., Pogosov, D.B. Cross-country robotized vehicles control: Fuel saving technique // International Journal of Mathematical Models and Methods in Applied Sciences, 2015, 9, pp. 211-217.
7. Pshikhopov, V.K., Medvedev, M.Y., Gurenko, B.V. Homing and docking autopilot design for autonomous underwater vehicle // Applied Mechanics and Materials, 2014, 490-491, pp. 700-707.
8. Medvedev, M., Pshikhopov, V. Design of robust control for block nonlinear systems by lyapunov functions method // Advanced Materials Research, 2014, 1049-1050, pp. 1048-1055.
9. Pshikhopov, V.K., Fedotov, A.A., Medvedev, M.Yu., Medvedeva, T.N., Gurenko, B.V. Position-trajectory system of direct adaptive control marine autonomous vehicles // 2014 the 4th International Workshop on Computer Science and Engineering — Summer, WCSE 2014.
10. Pshikhopov, V., Medvedev, M., Krukhmalev, V., Fedorenko, R., Gurenko, B. Method of docking for stratospheric airships of multibody transportation system // SAE Technical Papers 2014-September (September).
11. Pshikhopov, V.Kh., Medvedev, M.Yu., Gaiduk, A.R., Krukhmalev, V.A., Gurenko, B.V. Position-trajectory control system for unmanned robotic airship // IFAC Proceedings Volumes (IFAC-PapersOnline), 2014, 19, pp. 8953-8958.
12. Pshikhopov, V.Kh., Medvedev, M.Yu., Gaiduk, A.R., Gurenko, B.V. Control system design for autonomous underwater vehicle // Proceedings — 2013 IEEE Latin American Robotics Symposium, LARS 2013, 6693274, pp. 77-82.
13. Д.А. Белоглазов, В.Ф. Гузик, Е.Ю. Косенко, В.А. Крухмалев, М.Ю. Медведев, В.А. Переверзев, В.Х. Пшихопов, О.А. Пьявченко, Р.В. Сапрыкин, В.В. Соловьев, В.И. Финаев, Ю.В. Чернухин, И.О. Шаповалов. Интеллектуальное планирование траекторий подвижных объектов в средах с препятствиями / Под ред. проф. В.Х. Пшихопова. – М.: ФИЗМАТЛИТ, 2014. – 450 с.
14. Белоглазов Д.А., Гайдук А.Р., Косенко Е.Ю., Медведев М.Ю., Пшихопов В.Х., Соловьев В.В., Титов А.Е., Финаев В.И., Шаповалов И.О. Групповое управление подвижными объектами в неопределенных средах / Под. ред. В.Х. Пшихопова. — М.: ФИЗМАТЛИТ, 2015. — 305 c.
15. Пшихопов В.Х., Медведев М.Ю. Управление подвижными объектами в определенных и неопределенных средах. М.: Наука, 2011. 350 с. ISBN 978-5-02-037509-3.
16. Пшихопов В.Х., Медведев М.Ю. Оценивание и управление в сложных динамических системах. М.: Физматлит, 2009. С. 295. ISSN 978-5-9221-1176-8.
17. Пшихопов В.Х. Управление подвижными объектами в априори неформализованных средах // Известия Южного федерального университета. Технические науки. 2008. Т. 89. № 12. С. 6-19.
18. Пшихопов В.Х., Медведев М.Ю. Структурный синтез автопилотов подвижных объектов с оцениванием возмущений // М., Информационно-измерительные и управляющие системы. 2006. №1. С.103-109.
19. Пшихопов В.Х. Дирижабли: Перспективы использования в робототехнике // Мехатроника, автоматизация, управление. 2004. № 5. С. 15 – 20.
20. Пшихопов В.Х., Медведев М.Ю., Сиротенко М.Ю., Носко О.Э., Юрченко А.С. Проектирование систем управления роботизированных воздухоплавательных комплексов на базе дирижаблей. // Известия ТРТУ. 2006, № 3 (58). С. 160 – 167.
21. Пшихопов В.Х., Медведев М.Ю., Гайдук А.Р., Нейдорф Р.А., Беляев В.Е., Федоренко Р.В., Костюков В.А., Крухмалев В.А. Система позиционно-траекторного управления роботизированной воздухоплавательной платформой: математическая модель // Мехатроника, автоматизация и управление. 2013, № 6. С. 14 – 21.
22. Пшихопов В.Х., Медведев М.Ю., Гайдук А.Р., Нейдорф Р.А., Беляев В.Е., Федоренко Р.В., Костюков В.А., Крухмалев В.А. Система позиционно-траекторного управления роботизированной воздухоплавательной платформой: алгоритмы управления // Мехатроника, автоматизация и управление. 2013, № 7. С. 13 – 20.