Relevance
Motion control is one of the most intensively developing areas that require a constant development of theory and applications.

Nowadays one of the most topical problems is control of nonlinear multiply connected systems functioning autonomously under the conditions of uncertain parameters and disturbances and at presence of stationary and mobile obstacles. This problem doesn’t have a proper solution yet. The most important level for the operation of autonomous objects is the motion planning level that should ensure setting the intermediary goals and operation of the vehicle in the environment with stationary and mobile obstacles.
So, the application of the described structure in implementation of a position-path control system allows for a comprehensive implementation of the controller level and of a number of functions of the planning level. Besides, the position-path control systems provide an effective coupling of the planner with the controller level.
There are a number of factors that cause problems in synthesis and implementation of the mentioned control systems. The first one is the separation of the initially multiply connected models of the controlled plants. On one hand this simplifies synthesis and the structure of control system, but on the other hand it holds back from achieving the required performance criteria of the closed-loop system. The second factor giving the possibility to organize the effective motion of a vehicle is the absence of effective methods of coupling the motion planning systems (strategic control level) with the tactical (controller) level.
Features of Position-Path Control based on Unstable Modes
Application fields: systems of path-planning for mobile robots functioning in open space, in the air, in the water, and on the ground.
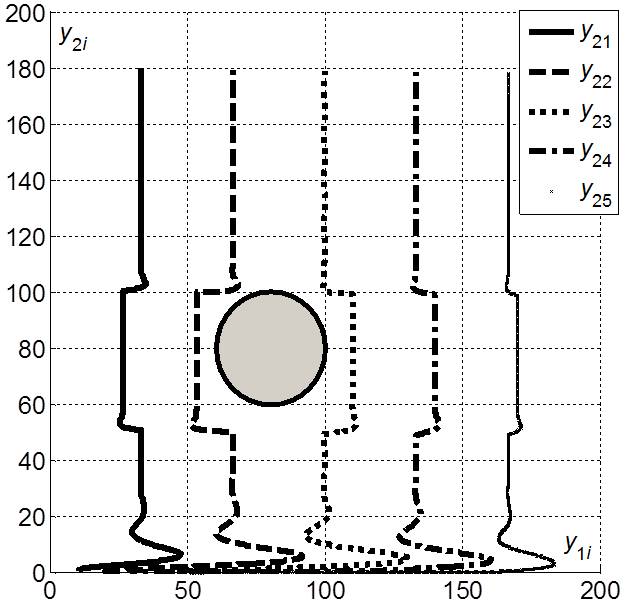
Distinctive features: setting the requirements to the motion path by linear and quadratic forms ensuring asymptotic stability of the planned paths in the normal functioning mode; artificial transition of the controlled plants into unstable modes by means of bifurcation parameters as a technique of getting out of complicated situations.
Advantages over other methods: low volume of a priory data, no need for mapping, implementation simplicity, coupling of the motion planning systems (strategic control level) with the tactical (controller) level.
Examples of Application of Position-Path Control Systems based on Unstable Modes
Autonomous mobile robot “Scythian -3” with a multiply connected nonlinear position-path controller avoids the emerging obstacles.
Obstacle avoidance by a group of mobile robots with a subsequent formation restoring.
Following complicated trajectories by the autonomous unmanned boat.
Bibliography
1. Pshikhopov, V., Medvedev, M., Gaiduk, A., Kolesnikov, A. Control method for heterogeneous vehicle groups control in obstructed 2-D environments // Lecture Notes in Computer Science (including subseries Lecture Notes in Artificial Intelligence and Lecture Notes in Bioinformatics), 2016, 9812, pp. 40-47.
2. Pshikhopov, V., Gurenko, B., Beresnev, M., Nazarkin, A. Implementation of underwater glider and identification of its parameters // Jurnal Teknologi 78 (6-13), pp. 109-114.
3. Pshikhopov, V., Medvedev, M., Kolesnikov, A., Fedorenko, R., Gurenko, B. Decentralized Control of a Group of Homogeneous Vehicles in Obstructed Environment // Journal of Control Science and Engineering 2016, 7192371.
4. Pshikhopov, V., Medvedev, M., Gurenko, B., Beresnev, M. Basic algorithms of adaptive position-path control systems for mobile units // ICCAS 2015 — 2015 15th International Conference on Control, Automation and Systems, Proceedings.
5. Pshikhopov, V., Gurenko, B., Beresnev, M.Research of algorithms for approaching and docking underwater vehicle with underwater station // MATEC Web of Conferences, 2015, 34, 04006.
6. Pshikhopov, V.K., Pogosov, D.B. Cross-country robotized vehicles control: Fuel saving technique // International Journal of Mathematical Models and Methods in Applied Sciences, 2015, 9, pp. 211-217.
7. Pshikhopov, V.K., Medvedev, M.Y., Gurenko, B.V. Homing and docking autopilot design for autonomous underwater vehicle // Applied Mechanics and Materials, 2014, 490-491, pp. 700-707.
8. Medvedev, M., Pshikhopov, V. Design of robust control for block nonlinear systems by lyapunov functions method // Advanced Materials Research, 2014, 1049-1050, pp. 1048-1055.
9. Pshikhopov, V.K., Fedotov, A.A., Medvedev, M.Yu., Medvedeva, T.N., Gurenko, B.V. Position-trajectory system of direct adaptive control marine autonomous vehicles // 2014 the 4th International Workshop on Computer Science and Engineering — Summer, WCSE 2014.
10. Pshikhopov, V., Medvedev, M., Krukhmalev, V., Fedorenko, R., Gurenko, B. Method of docking for stratospheric airships of multibody transportation system // SAE Technical Papers 2014-September (September).
11. Pshikhopov, V.Kh., Medvedev, M.Yu., Gaiduk, A.R., Krukhmalev, V.A., Gurenko, B.V. Position-trajectory control system for unmanned robotic airship // IFAC Proceedings Volumes (IFAC-PapersOnline), 2014, 19, pp. 8953-8958.
12. Pshikhopov, V.Kh., Medvedev, M.Yu., Gaiduk, A.R., Gurenko, B.V. Control system design for autonomous underwater vehicle // Proceedings — 2013 IEEE Latin American Robotics Symposium, LARS 2013, 6693274, pp. 77-82.
13. Д.А. Белоглазов, В.Ф. Гузик, Е.Ю. Косенко, В.А. Крухмалев, М.Ю. Медведев, В.А. Переверзев, В.Х. Пшихопов, О.А. Пьявченко, Р.В. Сапрыкин, В.В. Соловьев, В.И. Финаев, Ю.В. Чернухин, И.О. Шаповалов. Интеллектуальное планирование траекторий подвижных объектов в средах с препятствиями / Под ред. проф. В.Х. Пшихопова. – М.: ФИЗМАТЛИТ, 2014. – 450 с.
14. Белоглазов Д.А., Гайдук А.Р., Косенко Е.Ю., Медведев М.Ю., Пшихопов В.Х., Соловьев В.В., Титов А.Е., Финаев В.И., Шаповалов И.О. Групповое управление подвижными объектами в неопределенных средах / Под. ред. В.Х. Пшихопова. – М.: ФИЗМАТЛИТ, 2015. – 305 c.
15. Пшихопов В.Х., Медведев М.Ю. Управление подвижными объектами в определенных и неопределенных средах. М.: Наука, 2011. 350 с. ISBN 978-5-02-037509-3.
16. Пшихопов В.Х., Медведев М.Ю. Оценивание и управление в сложных динамических системах. М.: Физматлит, 2009. С. 295. ISSN 978-5-9221-1176-8.
17. Пшихопов В.Х. Управление подвижными объектами в априори неформализованных средах // Известия Южного федерального университета. Технические науки. 2008. Т. 89. № 12. С. 6-19.
18. Пшихопов В.Х., Медведев М.Ю. Структурный синтез автопилотов подвижных объектов с оцениванием возмущений // М., Информационно-измерительные и управляющие системы. 2006. №1. С.103-109.
19. Пшихопов В.Х. Дирижабли: Перспективы использования в робототехнике // Мехатроника, автоматизация, управление. 2004. № 5. С. 15 – 20.
20. Пшихопов В.Х., Медведев М.Ю., Сиротенко М.Ю., Носко О.Э., Юрченко А.С. Проектирование систем управления роботизированных воздухоплавательных комплексов на базе дирижаблей. // Известия ТРТУ. 2006, № 3 (58). С. 160 – 167.
21. Пшихопов В.Х., Медведев М.Ю., Гайдук А.Р., Нейдорф Р.А., Беляев В.Е., Федоренко Р.В., Костюков В.А., Крухмалев В.А. Система позиционно-траекторного управления роботизированной воздухоплавательной платформой: математическая модель // Мехатроника, автоматизация и управление. 2013, № 6. С. 14 – 21.
22. Пшихопов В.Х., Медведев М.Ю., Гайдук А.Р., Нейдорф Р.А., Беляев В.Е., Федоренко Р.В., Костюков В.А., Крухмалев В.А. Система позиционно-траекторного управления роботизированной воздухоплавательной платформой: алгоритмы управления // Мехатроника, автоматизация и управление. 2013, № 7. С. 13 – 20.