Актуальность
Одной из наиболее интенсивно развивающихся областей, требующих постоянного совершенствования теории и практики управления, является управление движением.

В настоящее время к актуальным и нерешенным в требуемой степени задачам управления движением относится построение управления нелинейными, многосвязными системами, автономно функционирующими в условиях неопределенности параметров и возмущений, наличия стационарных и нестационарных препятствий. Для функционирования автономных объектов определяющим является уровень планирования движения, который должен обеспечивать формирование промежуточных целей функционирования и функционирование подвижного объекта в средах со стационарными и нестационарными препятствиями.
Таким образом, структура системы управления движением автономного подвижного объекта должна включать в себя уровень интеллектуального планирования и согласованный с ним регуляторный уровень.
Реализация такой структуры в рамках системы позиционно-траекторного управления позволяет в полной мере реализовать регуляторный уровень и ряд функций уровня планирования. Кроме того, системы позиционно-траекторного управления позволяют эффективно сопрягать планировщик с регуляторным уровнем.
Исследование существующих в настоящее время планировщиков на основе метода потенциальных полей и других графо-аналитических методов показало, что данные методы в основном используются для планирования траекторий в средах со стационарными препятствиями. Вызвано это тем, что эффективность конкретной используемой аналитической функции существенно зависит от конфигурации препятствий в пространстве рабочих координат и от формы препятствий. Отдельно стоить отметить генетические алгоритмы, которые нашли широкое применение в задачах поиска оптимального пути в сложных средах со стационарными препятствиями. При наличии подвижных или заранее неизвестных препятствий генетические алгоритмы требуют обеспечения системы управления достаточным вычислительным ресурсом.
Для всех рассмотренных графо-аналитических методов и поисковых алгоритмов следует отметить: расширение функциональности и повышение эффективности планировщиков может быть достигнуто за счет разработки комбинированных методов, что позволит применять их и в средах с нестационарными препятствиями.
Особенности систем позиционно-траекторного управления на основе графо-аналитических методов и поисковых алгоритмов
Области применения: системы планирования траекторий перемещения мобильных роботов, функционирующих в космическом пространстве, воздушной, водной среде и на земной поверхности.
Отличительные черты: применение теории графов и аналитических методов теории управления для синтеза траекторий; глобальный характер траекторий получаемый при использовании поисковых алгоритмов, локальный – при использовании графо-аналитических интеллектуальных алгоритмов.
Преимущества перед другими подходами: поисковые алгоритмы в большинстве случаев обеспечивают оптимальность получаемых траекторий, графо-аналитические методы просты в реализации, не требуют применения экспертных знаний; позволяют интегрировать подсистемы планирования и позиционно-траекторное управления, что упрощает общую структуру системы управления движением.
Примеры реализации систем позиционно-траекторного управления на основе графо-аналитических методов и поисковых алгоритмов
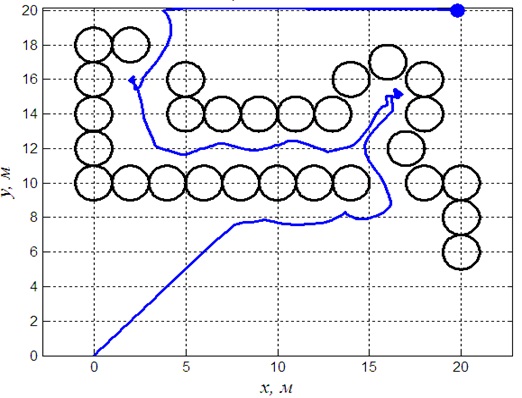
Пример перемещения в среде типа лабиринта подвижного объекта с автономной системой управления на основе метода искусственных потенциальных полей и роевого алгоритма
Пример перемещения подвижного объекта с системой управления на основе искусственных потенциальных полей в среде с подвижными препятствиями
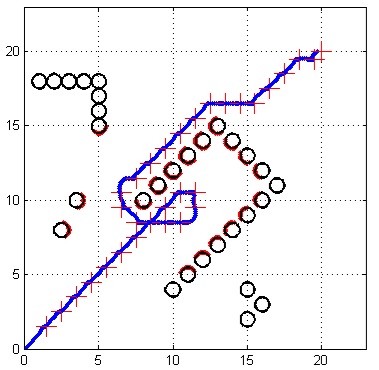
Пример применения генетических алгоритмов для вывода подвижного объекта из П-образного препятствия при перемещении в априори недетерминированной среде
Публикации
1. Pshikhopov, V., Medvedev, M., Gurenko, B., Beresnev, M. Basic algorithms of adaptive position-path control systems for mobile units // ICCAS 2015 — 2015 15th International Conference on Control, Automation and Systems, Proceedings.
2. Pshikhopov, V., Gurenko, B., Beresnev, M.Research of algorithms for approaching and docking underwater vehicle with underwater station // MATEC Web of Conferences, 2015, 34, 04006.
3. Soloviev, V.V., Pshikhopov, V.K., Shapovalov, I.O., Finaev, V.I., Beloglazov, D.A. Planning of the mobile robot motion in non-deterministic environments with potential fields method // International Journal of Applied Engineering Research, 2015, 10 (21), pp. 41954-41961.
4. Medvedev, M., Pshikhopov, V. Design of robust control for block nonlinear systems by lyapunov functions method // Advanced Materials Research, 2014, 1049-1050, pp. 1048-1055.
5. Pshikhopov, V., Medvedev, M., Gaiduk, A. Control method for vehicles on base of natural energy recovery // Applied Mechanics and Materials, 2014, 670-671, pp. 1330-1336.
6. Neydorf, R., Krukhmalev, V., Kudinov, N., Pshikhopov, V. Methods of statistical processing of meteorological data for the tasks of trajectory planning of MAAT feeders // SAE Technical Papers, 2013.
7. Д.А. Белоглазов, В.Ф. Гузик, Е.Ю. Косенко, В.А. Крухмалев, М.Ю. Медведев, В.А. Переверзев, В.Х. Пшихопов, О.А. Пьявченко, Р.В. Сапрыкин, В.В. Соловьев, В.И. Финаев, Ю.В. Чернухин, И.О. Шаповалов. Интеллектуальное планирование траекторий подвижных объектов в средах с препятствиями / Под ред. проф. В.Х. Пшихопова. – М.: ФИЗМАТЛИТ, 2014. – 450 с.
8. Белоглазов Д.А., Гайдук А.Р., Косенко Е.Ю., Медведев М.Ю., Пшихопов В.Х., Соловьев В.В., Титов А.Е., Финаев В.И., Шаповалов И.О. Групповое управление подвижными объектами в неопределенных средах / Под. ред. В.Х. Пшихопова. — М.: ФИЗМАТЛИТ, 2015. — 305 c.
9. Soloviev, V.V., Pshikhopov, V.K., Shapovalov, I.O., Finaev, V.I., Beloglazov, D.A. Planning of the mobile robot motion in non-deterministic environments with potential fields method // International Journal of Applied Engineering Research, 2015, 10 (21), pp. 41954-41961.
10. D.A. Beloglazov, V.I. Finaev, A.E. Tivov, I.O. Shapovalov, and V.V. Soloviev, Group robot control in non-deterministic environments using the potential field method // Proceedings of The 16th International Conference on Control, Automation and Systems (ICCAS 2016), 2016, pp. 371-376.
11. I. Shapovalov, V. Soloviev, V. Finaev, E. Kosenko, and J. Zargaryan, Research of Graph-analytical Methods for a Vehicle Motion Planning // Proceedings of The 15th International Conference on Control, Automation and Systems (ICCAS 2105), 2015, pp. 585-591.