Relevance
Motion control is one of the most intensively developing areas that require a constant development of theory and applications.

Nowadays one of the most topical problems is control of nonlinear multiply connected systems functioning autonomously under the conditions of uncertain parameters and disturbances and at presence of stationary and mobile obstacles. This problem doesn’t have a proper solution yet. The most important level for the operation of autonomous objects is the motion planning level that should ensure setting the intermediary goals and operation of the vehicle in the environment with stationary and mobile obstacles.
So, the application of the described structure in implementation of a position-path control system allows for a comprehensive implementation of the controller level and of a number of functions of the planning level. Besides, the position-path control systems provide an effective coupling of the planner with the controller level.
The analysis of the existing planners based on potential fields method and of the other grapho-analytica
For all the considered grapho-analytica
Features of Position-Path Control based on Grapho-Analytical Methods and Search Algorithms
Fields of application: mobile robots path planning operating in open space, in the air, in water and on the ground.
Features: application of the graph theory and analytical methods of control theory for path planning; global paths are obtained by search algorithms, while the local ones are given by grapho-analytica
Advantages over other methods: search algorithms in most of the cases ensure optimality of the obtained paths, grapho-analytica
Examples of Implementation of Position-Path Control based on Grapho-Analytical Methods and Search Algorithms
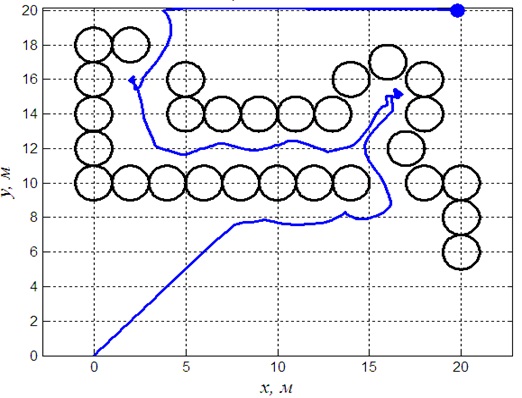
A vehicle’s motion example in the maze-type environment. The vehicle has an autonomous control system using artificial potential fields method and a roleplay algorithm.
A motion example of a vehicle with a control system using artificial potential fields method in the environment with mobile obstacles.
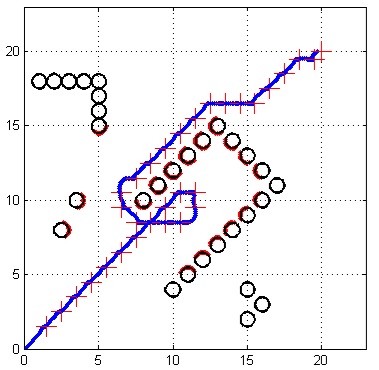
An example of application of genetic algorithms for avoiding П – shaped obstacle and motion in an undetermined environment.
Publications
1. Pshikhopov, V., Medvedev, M., Gurenko, B., Beresnev, M. Basic algorithms of adaptive position-path control systems for mobile units // ICCAS 2015 — 2015 15th International Conference on Control, Automation and Systems, Proceedings.
2. Pshikhopov, V., Gurenko, B., Beresnev, M.Research of algorithms for approaching and docking underwater vehicle with underwater station // MATEC Web of Conferences, 2015, 34, 04006.
3. Soloviev, V.V., Pshikhopov, V.K., Shapovalov, I.O., Finaev, V.I., Beloglazov, D.A. Planning of the mobile robot motion in non-deterministi
4. Medvedev, M., Pshikhopov, V. Design of robust control for block nonlinear systems by lyapunov functions method // Advanced Materials Research, 2014, 1049-1050, pp. 1048-1055.
5. Pshikhopov, V., Medvedev, M., Gaiduk, A. Control method for vehicles on base of natural energy recovery // Applied Mechanics and Materials, 2014, 670-671, pp. 1330-1336.
6. Neydorf, R., Krukhmalev, V., Kudinov, N., Pshikhopov, V. Methods of statistical processing of meteorological data for the tasks of trajectory planning of MAAT feeders // SAE Technical Papers, 2013.
7. D.A.Beloglazov, V.F. Guzik, E.U. Kosenko, V.A.Krukhmalev, M.U.Medvedev, V.A.Pereverzev, V.Kh.Pshikhopov, A.O.Pyavchenko, R.V.Saprykin, V.V.Soloviev, V.I.Finaev, U.V.Chernukhin, I.O.Shapovalov, Intelligent path planning for environments with mobile obstacles. Ed. V.Kh.Pshikhopov, Moscow, Fizmatlit, 2014, 450p
8. D.A. Beloglazov, A.R. Gaiduk, E.U.Kosenko, M.U.Medvedev, V.Kh.Pshikhopov, V.V.Soloviev, A.E. Titov, V.I. Finaev, I.O.Shapovalov, Group control of mobile obstacles in undetermined environments. Ed. V.Kh.Pshikhopov, Fizmatlit, Moscow, 2015, 305p.
9. Soloviev, V.V., Pshikhopov, V.K., Shapovalov, I.O., Finaev, V.I., Beloglazov, D.A. Planning of the mobile robot motion in non-deterministi
10. D.A. Beloglazov, V.I. Finaev, A.E. Tivov, I.O. Shapovalov, and V.V. Soloviev, Group robot control in non-deterministi
11. I. Shapovalov, V. Soloviev, V. Finaev, E. Kosenko, and J. Zargaryan, Research of Graph-analytical Methods for a Vehicle Motion Planning // Proceedings of The 15th International Conference on Control, Automation and Systems (ICCAS 2105), 2015, pp. 585-591.