Актуальность
В области развития современной робототехники можно выделить два направления, первое из которых связано с разработкой узкоспециализированных робототехнических комплексов, решающих ограниченный круг задач, а второе направление связано с разработкой многофункциональных комплексов, предназначенных для решения широкого круга задач. Очевидно, что с точки зрения гибкости и универсальности многофункциональные комплексы при существенно более высокой стоимости их создания обладают преимуществами перед узкоспециализированными.

В свою очередь, многофункциональные робототехнические комплексы могут быть физически реализованы на базе одиночной сложной робототехнической платформы или на основе группы простых роботов с небольшим набором функций. Второй путь представляется наиболее эффективным, так как он позволяет решать разнообразные задачи с наименьшими затратами. Вместе с тем, эффективное применение групп роботов невозможно без разработки специальных систем группового управления.
Проблемы группового управления подвижными объектами, требующие решения задач децентрализации системы управления, кластеризации группы и распределения целей, являются предметом повышенного интереса зарубежных и отечественных ученых, результаты исследований которых нашли отражение в большом количестве публикаций. Этот интерес вызван перспективностью применения групп подвижных объектов в различных областях человеческой деятельности и, одновременно, сложностью решаемых задач.
Особенности интеллектуальных систем группового управления движением
Области применения: групповое применение робототехнических комплексов в условиях противодействия, апробация, оценка и анализ стратегий и тактик применения робототехнических комплексов; комплексная оценка эффективности применения робототехнических комплексов в различных условиях функционирования.
Особенности и преимущества перед другими подходами аналогичны особенностям и преимуществам данных подходов в случае их применения для управления отдельными робототехническими системами.
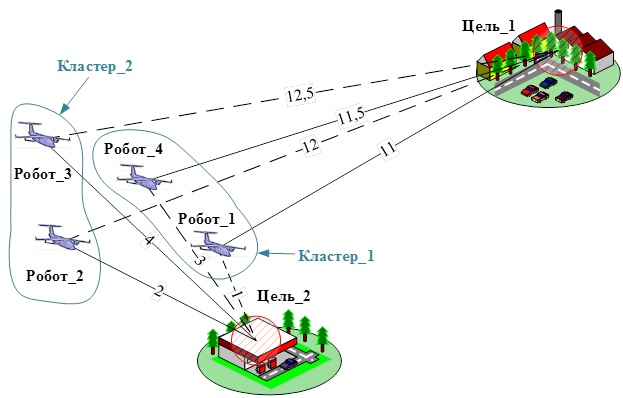
Примеры реализации интеллектуальных систем группового управления движением
Публикации
1. Pshikhopov, V., Medvedev, M., Gaiduk, A., Kolesnikov, A. Control method for heterogeneous vehicle groups control in obstructed 2-D environments // Lecture Notes in Computer Science (including subseries Lecture Notes in Artificial Intelligence and Lecture Notes in Bioinformatics), 2016, 9812, pp. 40-47.
2. Pshikhopov, V., Medvedev, M., Kolesnikov, A., Fedorenko, R., Gurenko, B. Decentralized Control of a Group of Homogeneous Vehicles in Obstructed Environment // Journal of Control Science and Engineering 2016, 7192371.
3. Д.А. Белоглазов, В.Ф. Гузик, Е.Ю. Косенко, В.А. Крухмалев, М.Ю. Медведев, В.А. Переверзев, В.Х. Пшихопов, О.А. Пьявченко, Р.В. Сапрыкин, В.В. Соловьев, В.И. Финаев, Ю.В. Чернухин, И.О. Шаповалов. Интеллектуальное планирование траекторий подвижных объектов в средах с препятствиями / Под ред. проф. В.Х. Пшихопова. – М.: ФИЗМАТЛИТ, 2014. – 450 с.
4. Белоглазов Д.А., Гайдук А.Р., Косенко Е.Ю., Медведев М.Ю., Пшихопов В.Х., Соловьев В.В., Титов А.Е., Финаев В.И., Шаповалов И.О. Групповое управление подвижными объектами в неопределенных средах / Под. ред. В.Х. Пшихопова. — М.: ФИЗМАТЛИТ, 2015. — 305 c.
5. D.A. Beloglazov, V.I. Finaev, A.E. Tivov, I.O. Shapovalov, and V.V. Soloviev, Group robot control in non-deterministic environments using the potential field method // Proceedings of The 16th International Conference on Control, Automation and Systems (ICCAS 2016), 2016, pp. 371-376.
6. Gaiduk A., Kapustyan S., Shapovalov I. Self-organization in groups of intelligent robots // Advances in Intelligent Systems and Computing, 2015. Vol. 345. pp. 171-181.
7. Косенко Е.Ю., Шаповалов И.О. Распределенное нелинейное управление группой роботов на основе квазилинейной формы уравнений // Известия ЮФУ. Технические науки. №5, 2014. – С. 45-51.
8. Пшихопов В.Х., Медведев М.Ю., Гайдук А.Р. Алгоритмы управления неоднородными группами подвижных объектов в двумерных средах с препятствиями // Мехатроника, автоматизация, управление, 2016, Т. 17, № 8, с. 515-524.
9. Гайдук А.Р., Капустян С.Г., Меркулов В.И., Бесклубова К.В. Групповое управление БЛА // Информационно-измерительные и управляющие системы, 2014. Т. 12, № 11, С. 24-36.