Актуальность
Одной из наиболее интенсивно развивающихся областей, требующих постоянного совершенствования теории и практики управления, является управление движением.

В настоящее время к актуальным и нерешенным в требуемой степени задачам управления движением относится построение управления нелинейными, многосвязными системами, автономно функционирующими в условиях неопределенности параметров и возмущений, наличия стационарных и нестационарных препятствий. Для функционирования автономных объектов определяющим является уровень планирования движения, который должен обеспечивать формирование промежуточных целей функционирования и функционирование подвижного объекта в средах со стационарными и нестационарными препятствиями.
Таким образом, структура системы управления движением автономного подвижного объекта должна включать в себя уровень интеллектуального планирования и согласованный с ним регуляторный уровень.
Реализация такой структуры в рамках системы позиционно-траекторного управления позволяет в полной мере реализовать регуляторный уровень и ряд функций уровня планирования. Кроме того, системы позиционно-траекторного управления позволяют эффективно сопрягать планировщик с регуляторным уровнем.
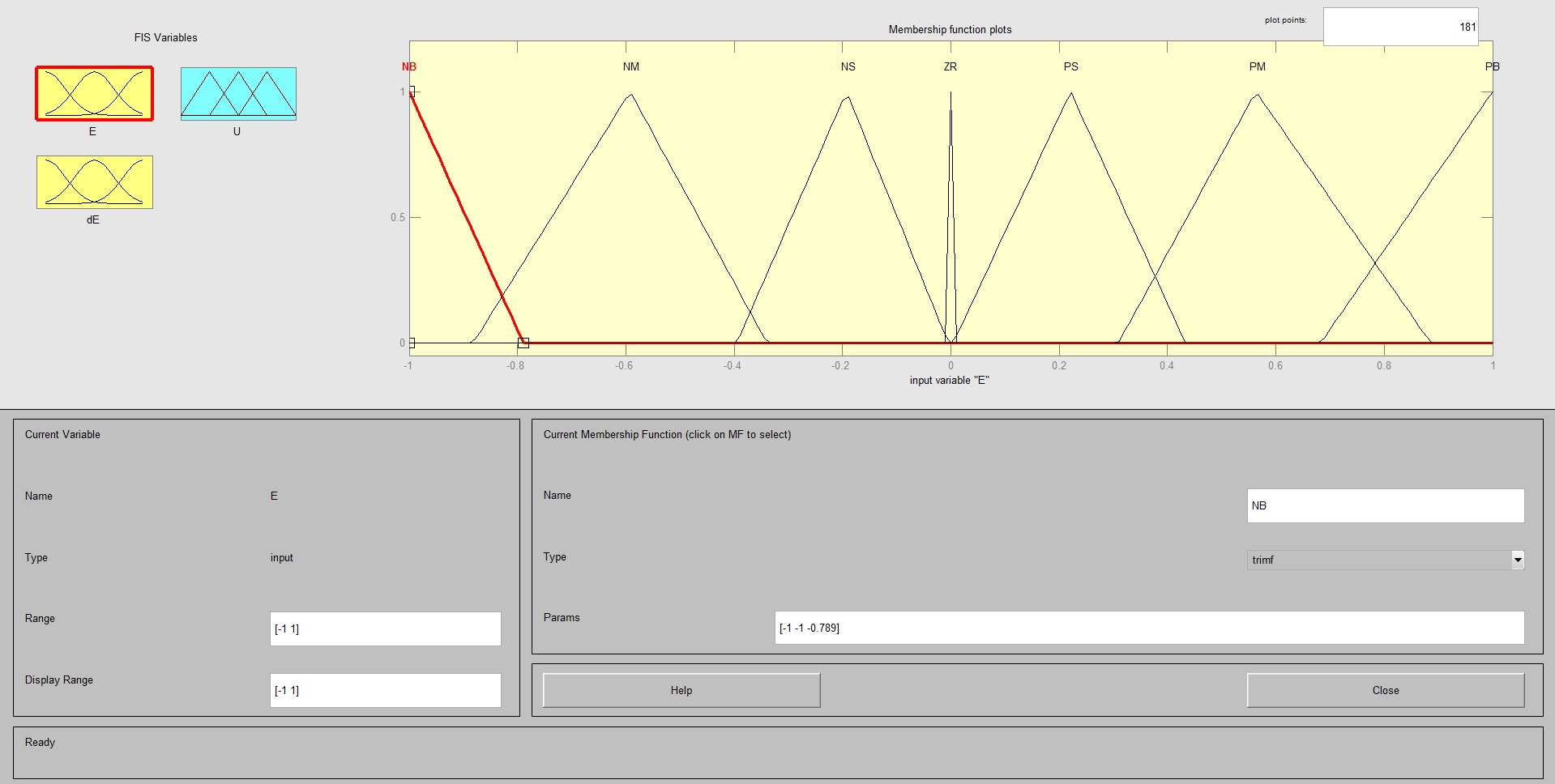
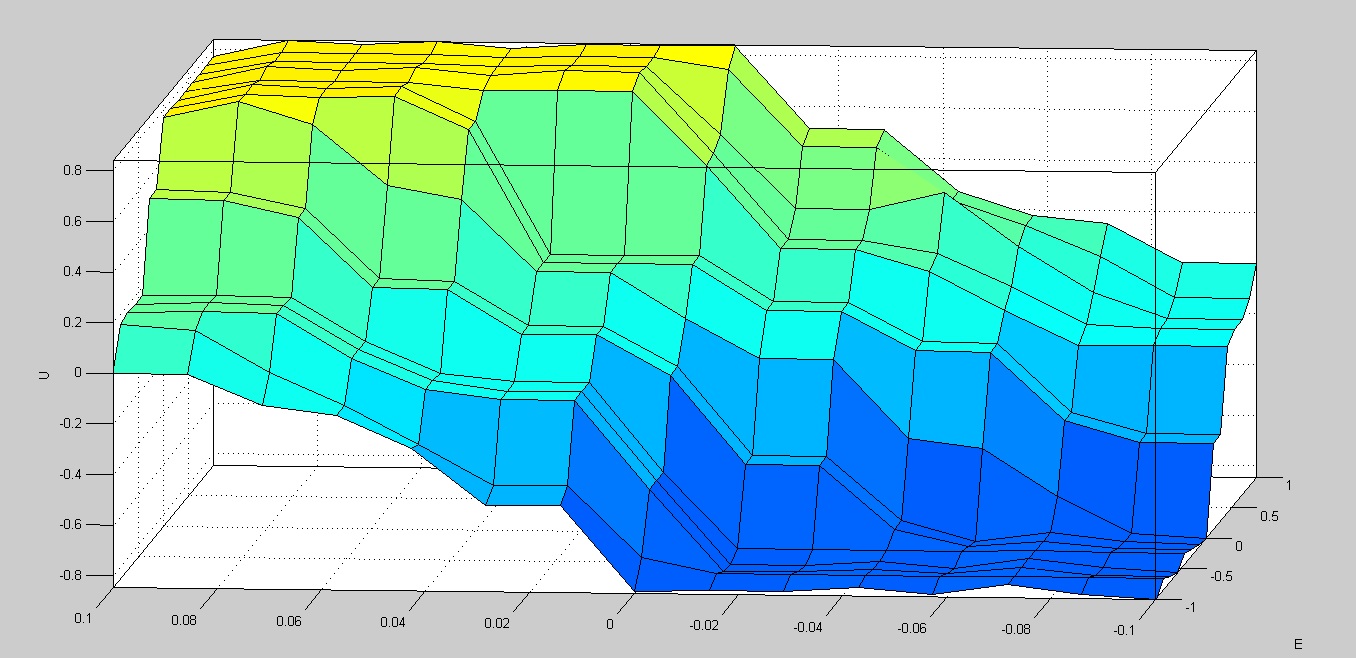
Особенности систем позиционно-траекторного управления на основе нечеткой логики
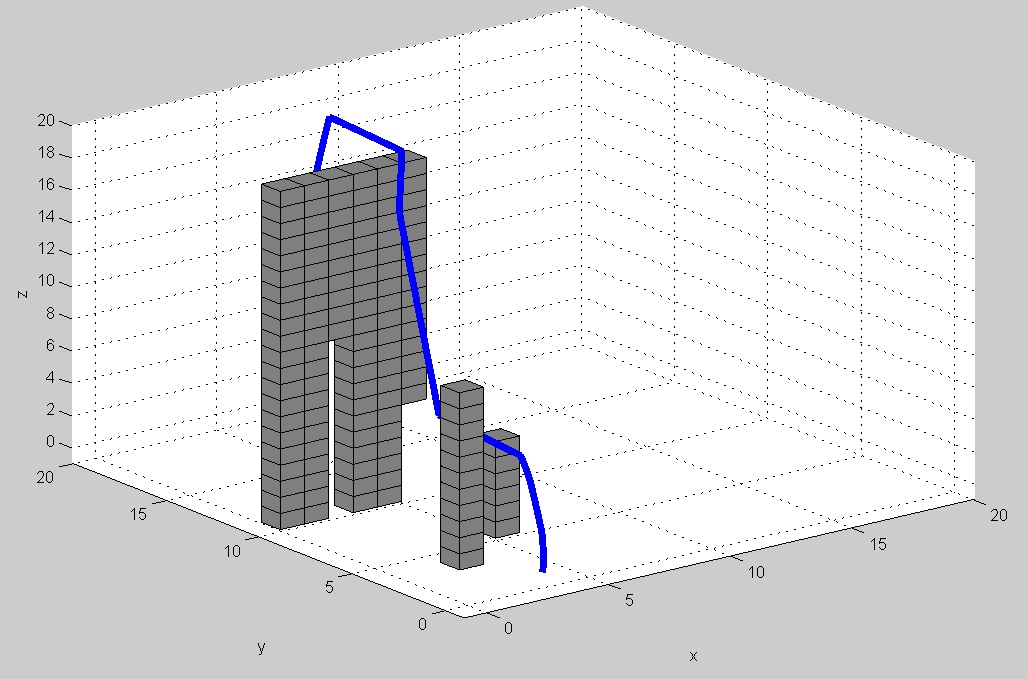
Области применения: системы планирования траекторий перемещения мобильных роботов, функционирующих в космическом пространстве, воздушной, водной среде и на земной поверхности.
Отличительные черты: использование теории нечетких множеств и поведенческого подхода при проектировании интеллектуальных систем планирования; локальный характер получаемых траекторий; использование априорных экспертных знаний.
Преимущества перед другими подходами: возможность работы с неопределенными, неполными данными; интуитивно понятные правила управления.
Примеры реализации систем позиционно-траекторного управления на основе нечеткой логики
Публикации
1. Design of the neuro-like learning control system for a vehicle. Finaev, V., Kobersy, I., Beloglazov, D., Kosenko, E., Soloviev, V. // WSEAS Transactions on Systems and Control, 2015, WSEAS Transactions on Systems and Control 10, pp. 328-334
2. Development of information support aiming at investigation into trainability of hy-brid adaptive neuro-fuzzy regulators. Beloglazov, D.A., Finaev, V.I. // World Applied Sciences Journal, 2013, 23 (11), pp. 1433-1440
3. Д.А. Белоглазов, В.Ф. Гузик, Е.Ю. Косенко, В.А. Крухмалев, М.Ю. Медведев, В.А. Переверзев, В.Х. Пшихопов, О.А. Пьявченко, Р.В. Сапрыкин, В.В. Соловьев, В.И. Финаев, Ю.В. Чернухин, И.О. Шаповалов. Интеллектуальное планирование траекторий подвижных объектов в средах с препятствиями / Под ред. проф. В.Х. Пшихопова. – М.: ФИЗМАТЛИТ, 2014. – 450 с.
4. Белоглазов Д.А., Гайдук А.Р., Косенко Е.Ю., Медведев М.Ю., Пшихопов В.Х., Соловьев В.В., Титов А.Е., Финаев В.И., Шаповалов И.О. Групповое управление подвижными объектами в неопределенных средах / Под. ред. В.Х. Пшихопова. — М.: ФИЗМАТЛИТ, 2015. — 305 c.
5. Beloglazov, D.A., Finaev, V.I. Development of information support aiming at investigation into trainability of hybrid adaptive neuro-fuzzy regulators // World Applied Sciences Journal, 2013, 23 (11), pp. 1433-1440.
6. Заргарян Ю.А., Косенко Е.Ю., Белоглазов Д.А., Финаев В.И. Формализация при управлении подвижными объектами в условиях неопределенности // Известия Волгоградского государственного технического университета, 2015, №6 (163), С. 210-217.
7. Белоглазов Д.А., Коберси И.С., Финаев В.И. Разработка адаптивного эволюционного алгоритма оптимизации на основе аппарата нечеткой логики // Известия ЮФУ. Технические науки, 2013, № 4, с. 169-175.
8. Коберси И.С., Белоглазов Д.А. Интеллектуальная адаптивная гибридная обучаемая система управления транспортными средствами // Известия ЮФУ. Технические науки, 2010, № 1, с. 110-117.