Актуальность
Актуальность комплекса моделирования связана с потребностью в предоставлении инструментария для тестирования и отладки систем управления, отработки алгоритмов управления и планирования, а также обучения операторов. Комплекс предусматривает задействование на ранних этапах разработки систем управления и планирования движения морских объектов, что позволяет сократить издержки на тестирование, отладку и внесение конструктивных изменений в ходе разработки. Модульная интеграция и гибкая настройка параметров выгодно отличают комплекс моделирования от существующих аналогов
Использование программных средств моделирования в итерационном процессе конструирования системы управления МПО имеет целью:
- исследование особенностей математической модели МПО;
- верификацию системы управления МПО – проверку соответствия ее характеристик заданным, оценку показателей качества системы;
- уточнение использованных математических моделей и алгоритмов управления;
- графическое представление полученных результатов.
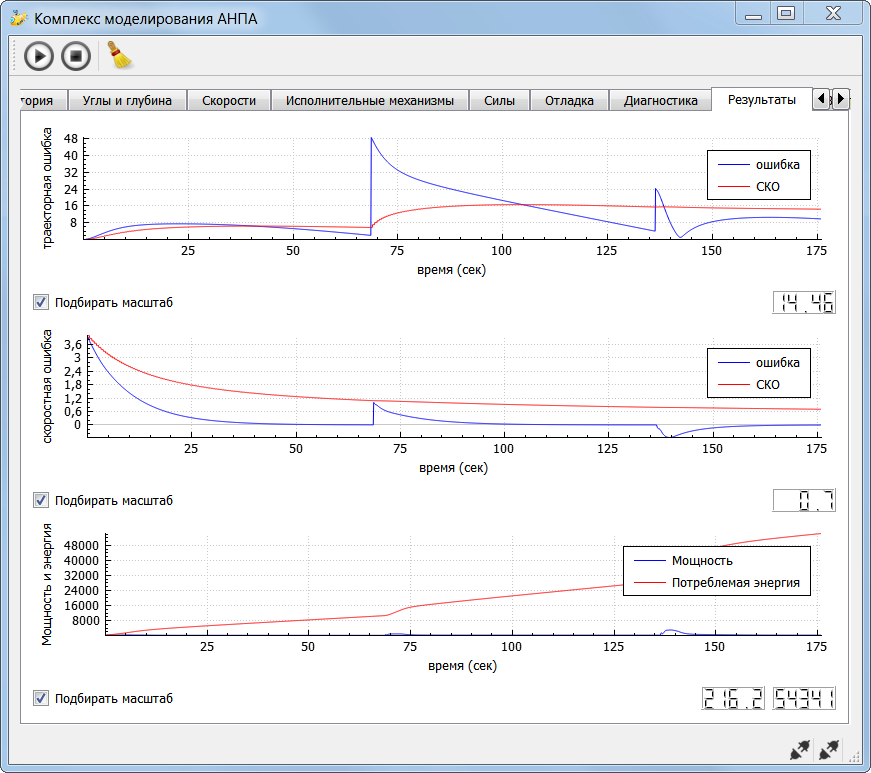
Конечной целью использования программного комплекса моделирования движений МПО является принятие решения о целесообразности и адекватности применяемых алгоритмов и структур, в состав которых входят структура системы управления, структура регулятора, позиционирования в заданном районе и движения по заданной траектории, алгоритмы планирования движения, обхода препятствий, алгоритмы автоматизированного (дистанционно управляемого) движения, алгоритмы аварийной посадки, алгоритмы оценивания внешних и внутренних структурных и параметрических возмущений. Это решение должно основываться на анализе полученных результатов моделирования. Такими результатами являются среднеквадратическое отклонение от заданной траектории, эффективность управления МПО, которая определяется совокупностью заданных критериев, оценка энергетических параметров и т.д.
Предлагаемые решения
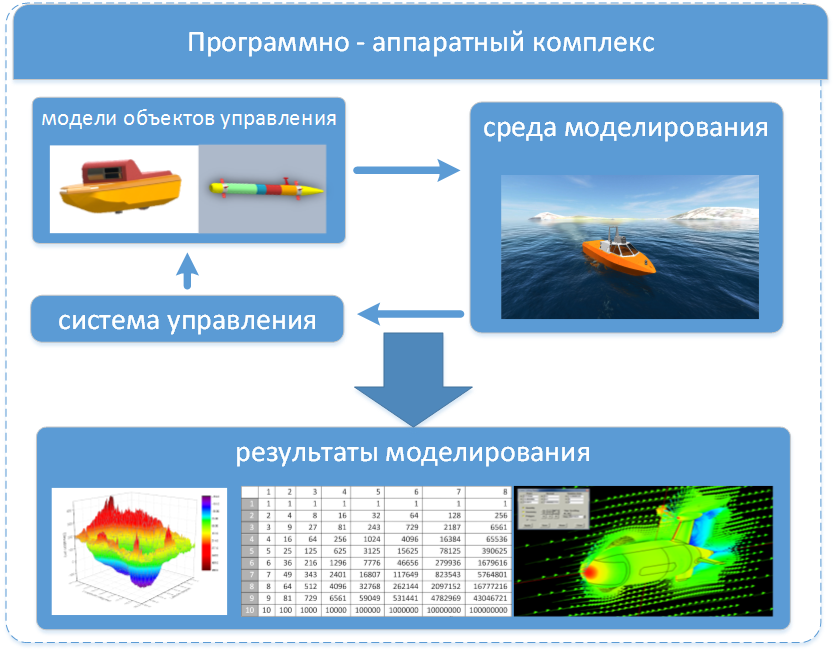
Программная реализация

Программно-аппаратная реализация. Полунатурное моделирование
Используемые методы
- теория управления;
- аналитическая механики;
- теории матриц;
- аналитический синтез нелинейных позиционно-траекторных систем
- управления подвижными объектами;
- построение редуцированных наблюдателей Луенбергера для нелинейных систем;
- имитационное моделирования.
Общий вид трёхмерной сцены моделирования АНПА
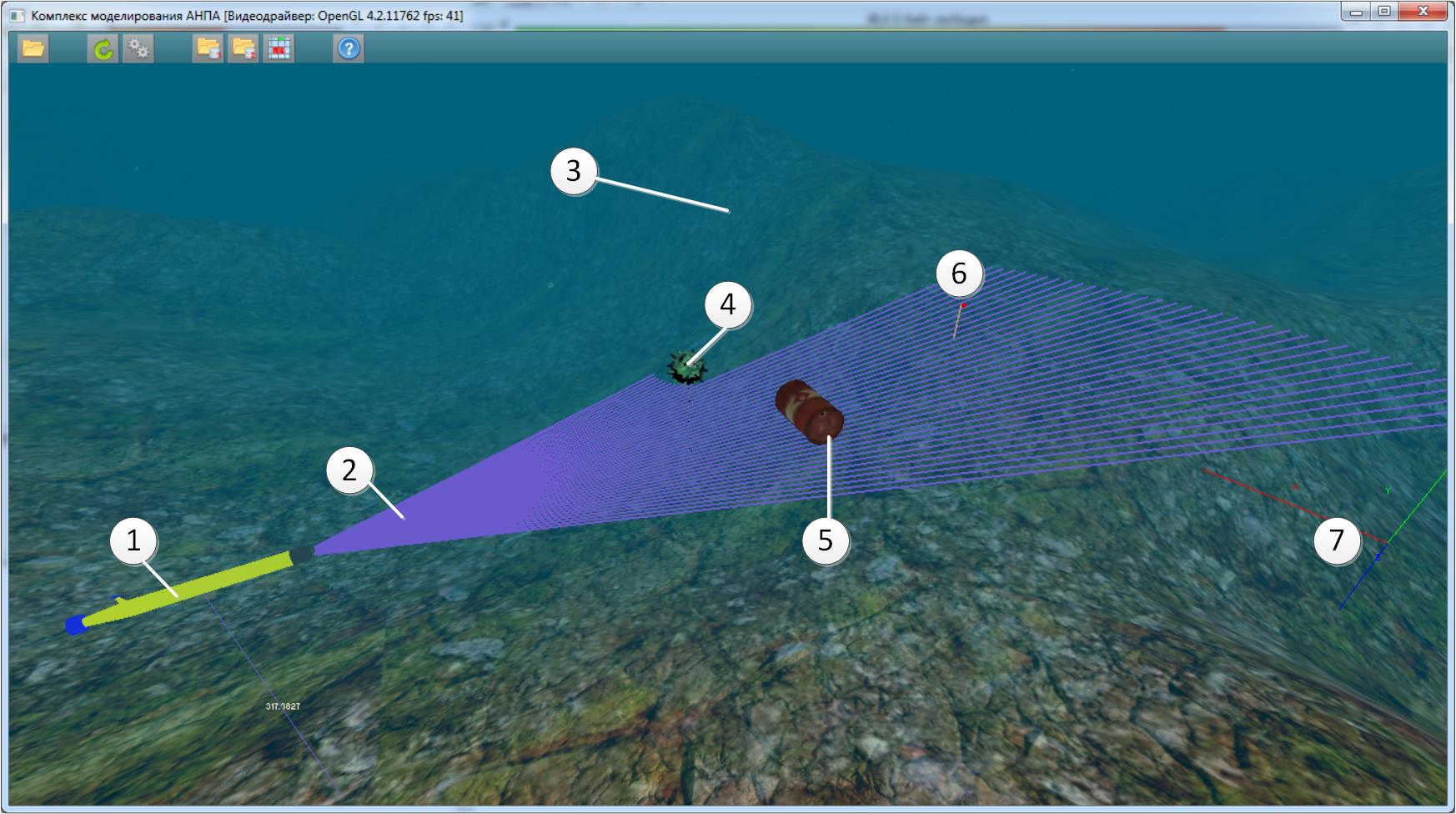
- модель АНПА;
- модель сенсорной подсистемы АНПА;
- ландшафт;
- препятствие-мина;
- препятствие-бочка;
- текущий целевой объект;
- начало координат сцены.
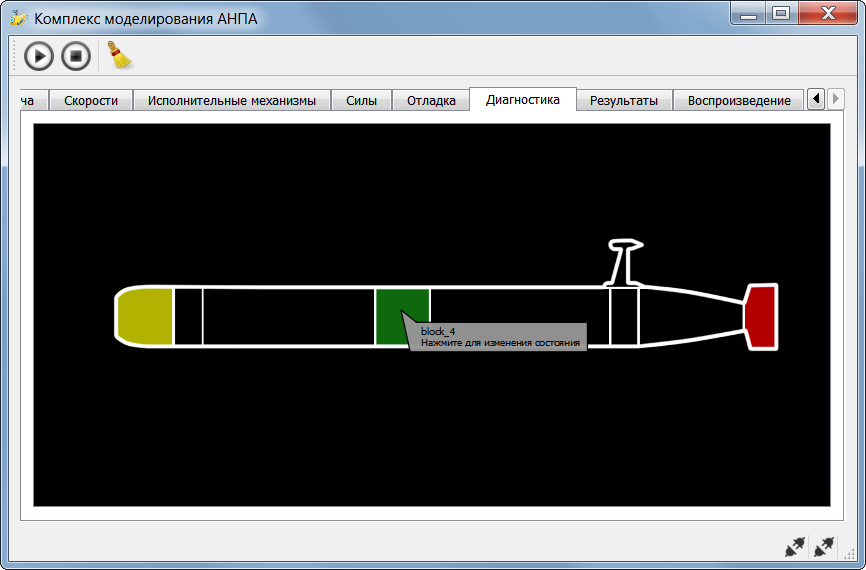
Система диагностики АНПА
Состав комплекса моделирования АНПА

При построении программного комплекса моделирования движений МПО исходными данными являются:
- математическая модель ;
- закон формирования управляющих воздействий;
- алгоритмы планировщика перемещений;
- алгоритмы оценивания параметров и возмущений;
- данные о погрешностях датчиков положения, скорости, ускорения и т.д., модели шумов в каналах измерения и управления;
- модель внешней среды.
Программный комплекс моделирования реализует следующие функции:
- формирование тестовой миссии;
- программную реализацию алгоритмов планирования траекторий МПО;
- настройки базового алгоритма управления для работы в заданном режиме;
- расчет управляющих воздействий на основе заданного закона управления;
- передачу вычисленных управляющих воздействий в модель МПО и интегрирование математической модели;
- введение возмущений, модели среды, погрешностей;
- программную реализацию алгоритмов оценивания возмущений;
- сохранение истории переменных состояния модели;
- построение графиков переменных состояния МПО, выработанных управляющих воздействий и других переменных;
- отображение трехмерной модели движения;
- оценку результатов численного моделирования: вычислительной сложности алгоритмов, реализованных в системе управления, энергетических параметров, которые должен иметь проектируемый МПО и др.
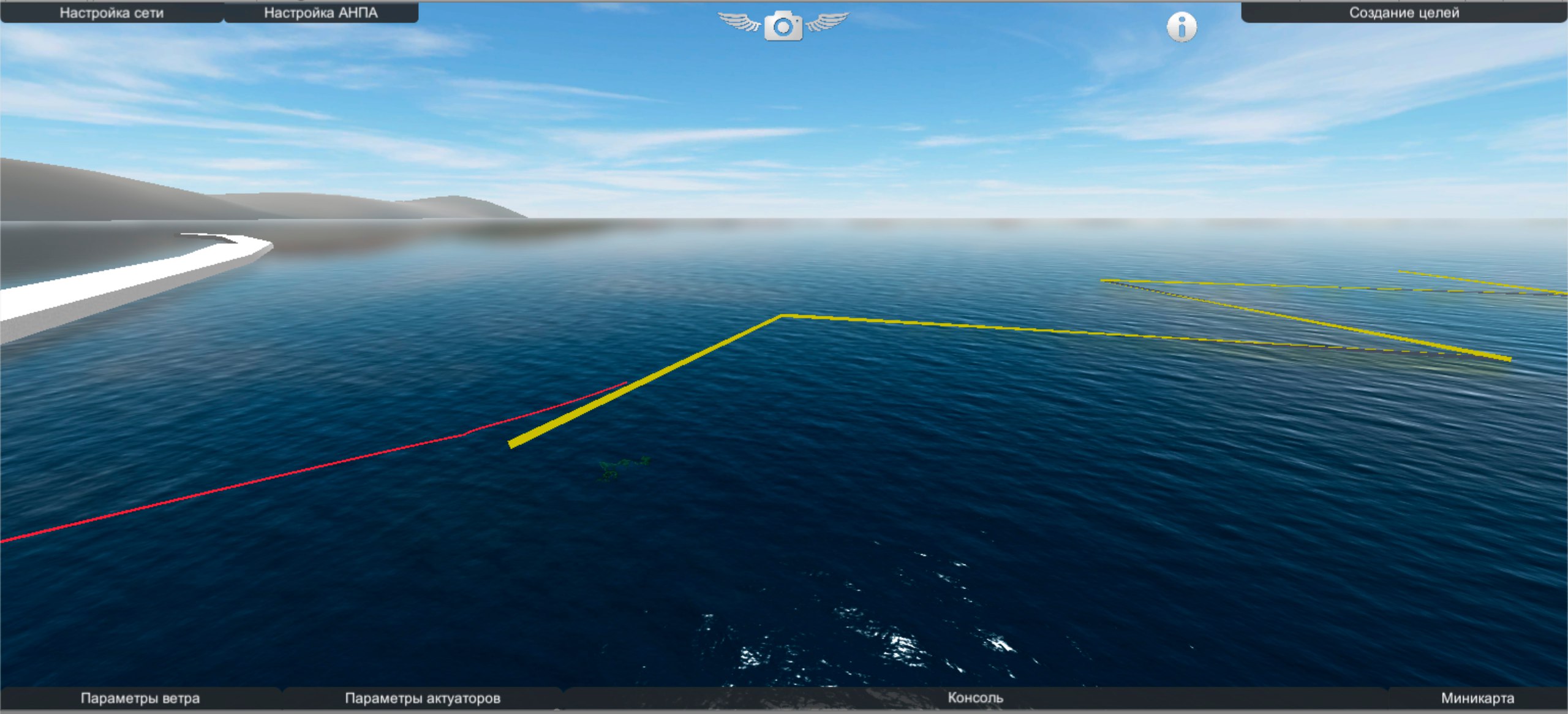
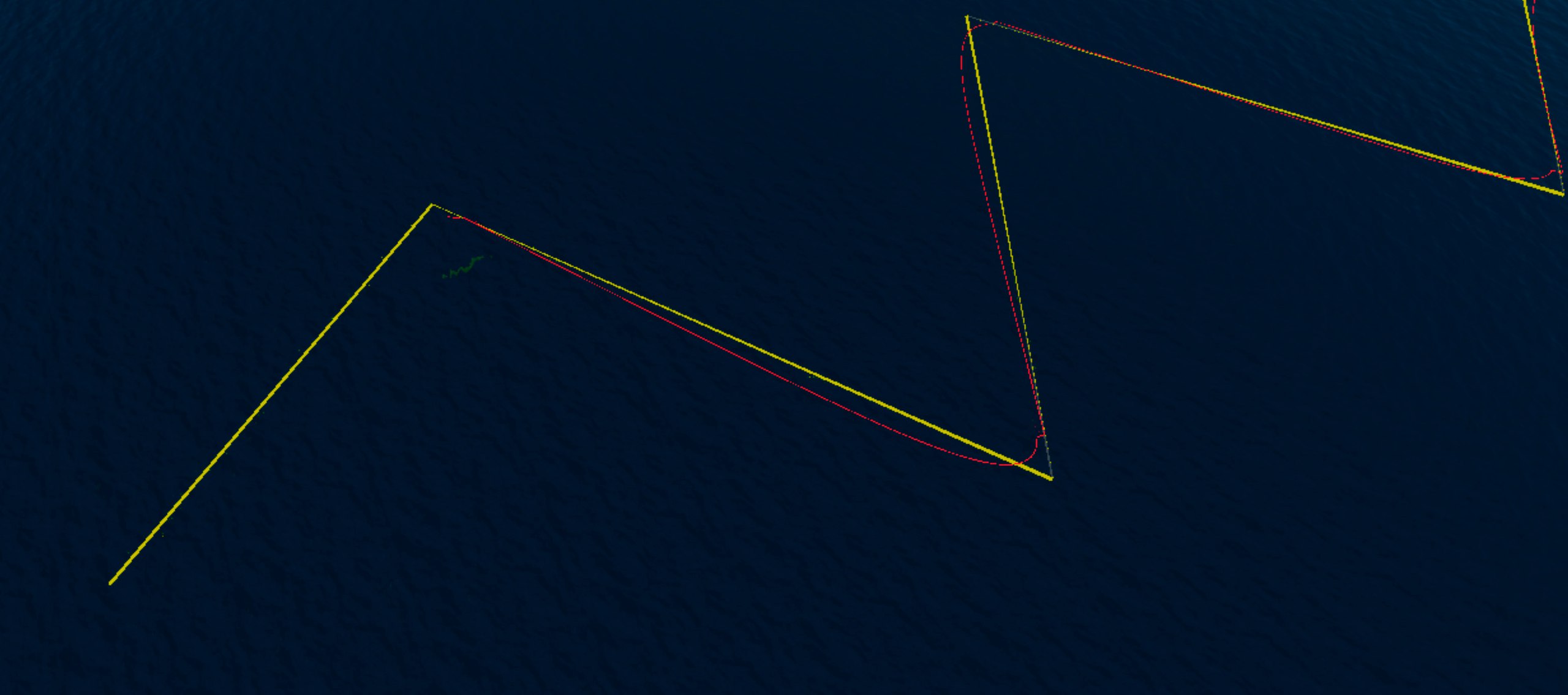
Тестовые сцены