Importance
One of the most intensively developing areas requiring constant development of its theory and applications of control is motion control.

At present the most topical and not properly solved tasks is generation of control for nonlinear multiply connected systems operating autonomously under the conditions of uncertainty of parameters and disturbances, presence of stationary and mobile obstacles. The most important level for the autonomous objects is the path-planning level that should ensure formation of the intermediate goals and operation of the vehicle in environments with stationary and mobile obstacles.
So the structure of the vehicle’s motion control system should include the intelligent path-planning level and a cohered controller level.
So the structure of the vehicle’s motion control system should include the intelligent path-planning level and a cohered controller level.
Features of position-path fuzzy control systems
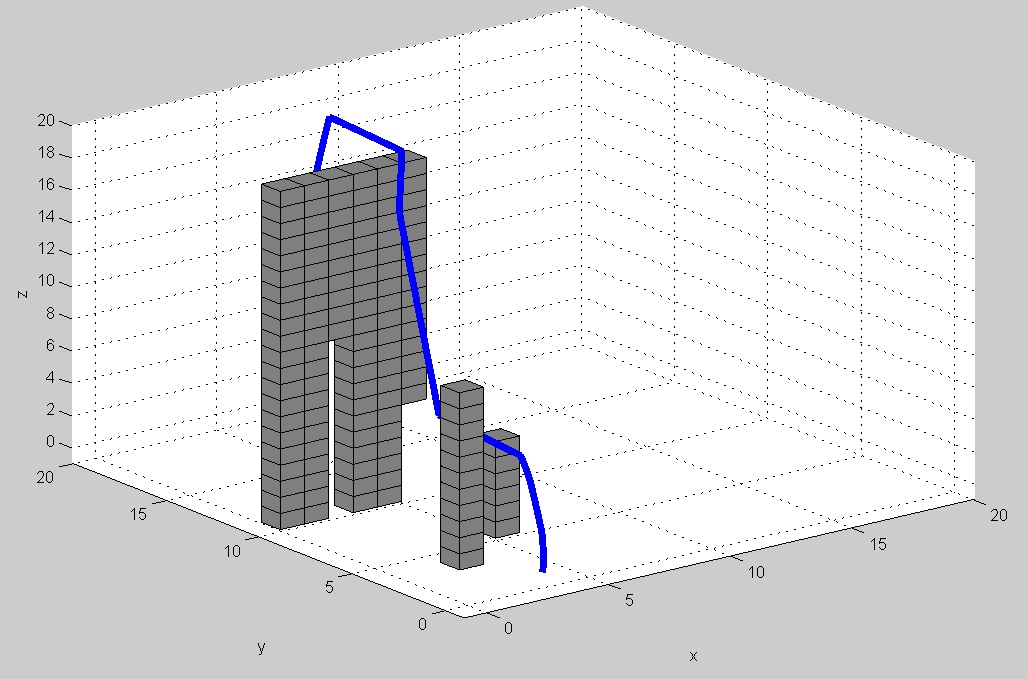
Areas of application: path-planning systems for mobile robots operating in space, in the air, in water and on the ground.
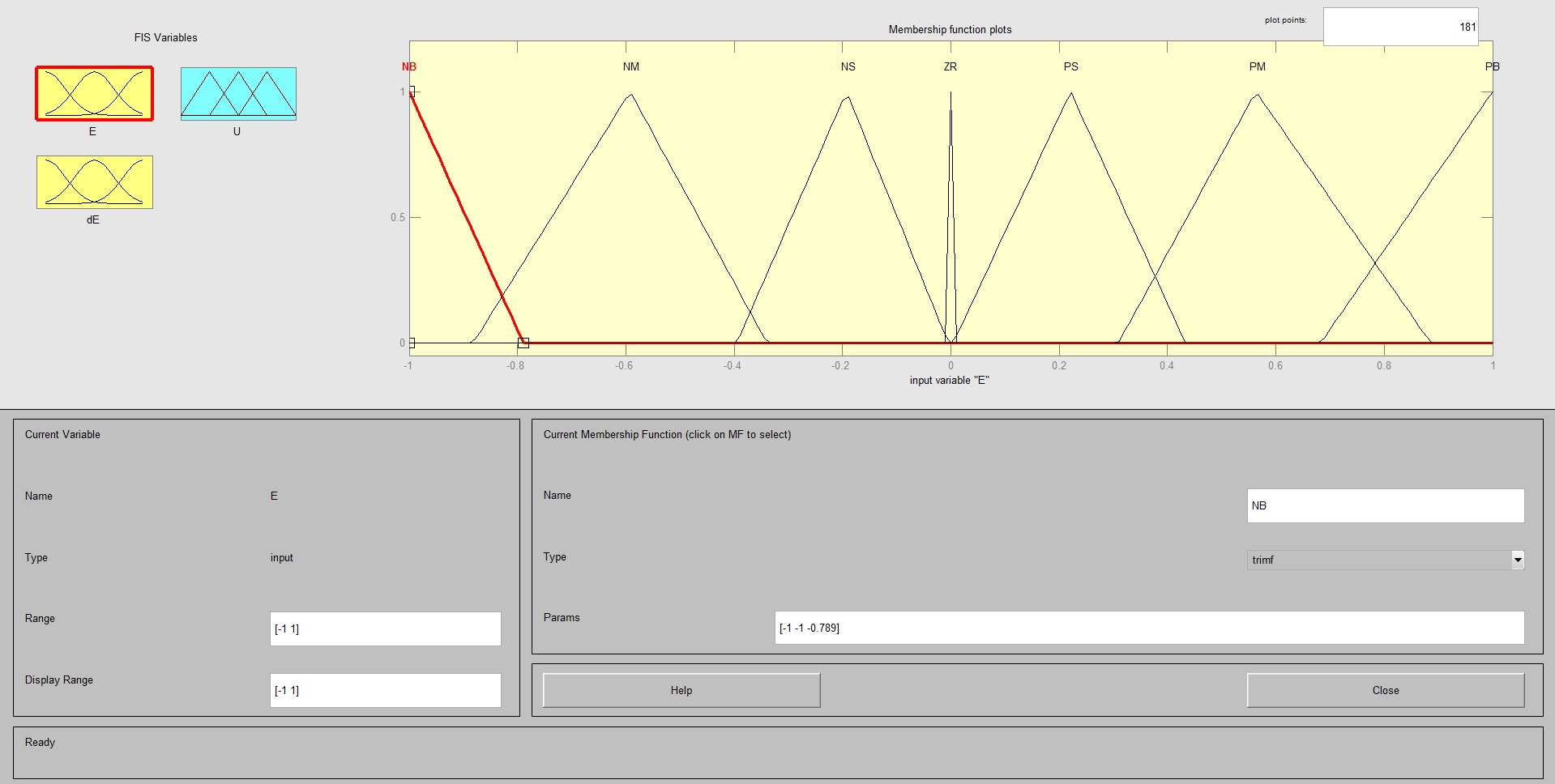
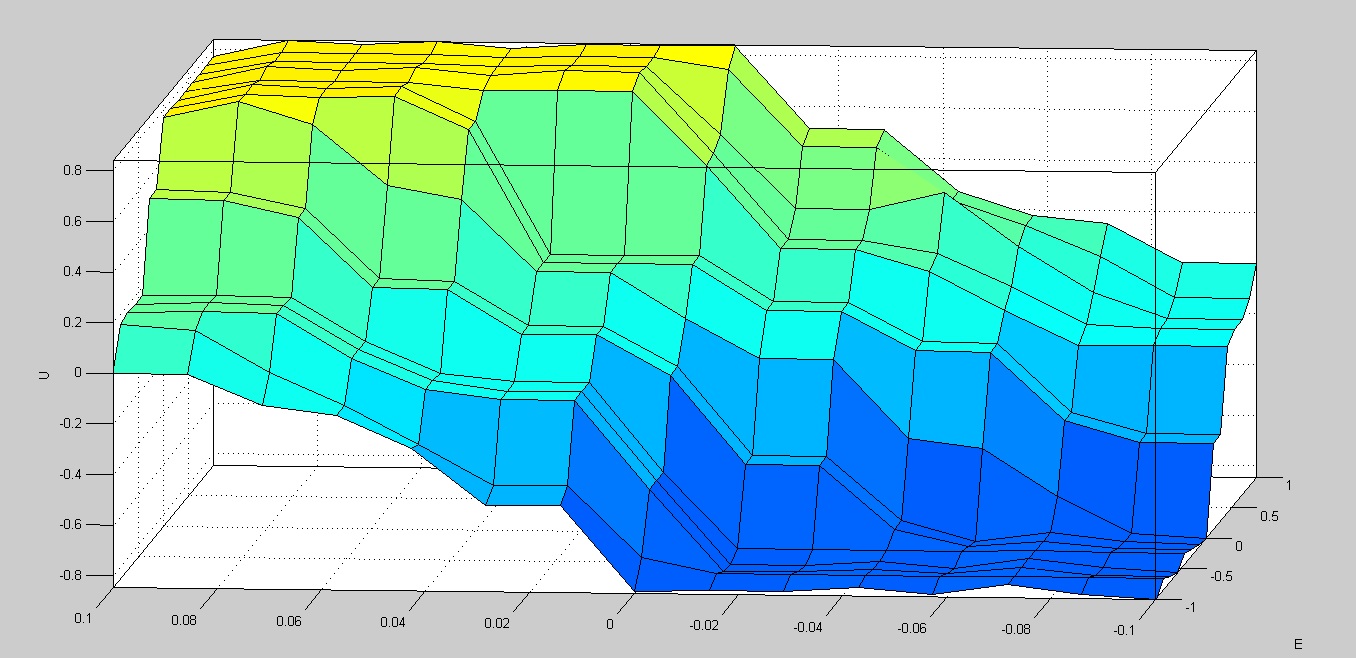
Features: using the fuzzy logic theory and behavioral approach for design of intelligent path-planning systems, local character of the obtained trajectories; using a-priory expert knowledge.
Advantages over other approaches: capable of working with uncertain incomplete data; intuitive control rules.
Examples of position-path fuzzy control systems implementation
Bibliography
1. Design of the neuro-like learning control system for a vehicle. Finaev, V., Kobersy, I., Beloglazov, D., Kosenko, E., Soloviev, V. // WSEAS Transactions on Systems and Control, 2015, WSEAS Transactions on Systems and Control 10, pp. 328-334
2. Development of information support aiming at investigation into trainability of hy-brid adaptive neuro-fuzzy regulators. Beloglazov, D.A., Finaev, V.I. // World Applied Sciences Journal, 2013, 23 (11), pp. 1433-1440
3. D.A. Beloglazov, V.F. Guzik, E.U,Kosenko, V.A.Krukhmalev, M.U.Medvedev, V.A.Pereverzev, V.Kh.Pshikhopov, O.A.Pyavchenko, R.V.Saprykin,V.V.Soloviev, V.I.Finaev, U.V.Chernukhin, I.O.Shapovalov, Intelligent path-planning for vehicles in obstructed environments, Ed.V.Kh.Pshikhopov, Fizmatlit, Moscow, 2014, 450 p.
4. D.A.Beloglazov, A.R.Gaiduk, E.U.Kosenko, M.U.Medvedev, V.Kh.Medvedev, Solviev V.V., A.E.Titov, V.I.Finaev, I.O.Shapovalov. Group control of vehicles in uncertain environments. Ed. V.Kh.Pshikhopov, FIZMATLIT, Moscow, 305 p., 2015.
5. Beloglazov, D.A., Finaev, V.I. Development of information support aiming at investigation into trainability of hybrid adaptive neuro-fuzzy regulators // World Applied Sciences Journal, 2013, 23 (11), pp. 1433-1440.
6. U.A. Zargarian, E.U. Kosenko, D.A.Beloglazov, V.I. Finaev, Formalization in vehicle control under the conditions of uncertainty, Izvestiya of Volgograd state technical university, 2015, №6 (163), pp. 210-217.
7. D.A.Beloglazov, V.I.Finaev, Development of adaptive evolutionary optimization algorithm based on fuzzy logic apparatus// SFEDU Publishing House. Technical sciences, 2013, No.4, pp. 169-175.
8. I.S.Kobersy, D.A.Beloglazov, Intelligent adaptive hybrid trainable vehicle control system // SFEDU Publishing House. Technical sciences, 2010, No.1, pp. 110-117.